
นี่คือบทสรุปของผู้คนในอุตสาหกรรมเมื่อสรุปการออกแบบฟิกซ์เจอร์ แต่มันก็ไม่ง่ายเลยในกระบวนการติดต่อกับแผนงานต่างๆ เราพบว่า การออกแบบเบื้องต้นมักมีปัญหาเรื่องการวางตำแหน่งและการหนีบอยู่เสมอด้วยวิธีนี้ โครงการนวัตกรรมใดๆ จะสูญเสียความสำคัญในทางปฏิบัติไปมีเพียงความเข้าใจความรู้พื้นฐานเกี่ยวกับการวางตำแหน่งและการจับยึดเท่านั้นที่ทำให้เรามั่นใจในความสมบูรณ์ของรูปแบบการออกแบบและการประมวลผลฟิกซ์เจอร์ได้
ความรู้เกี่ยวกับเครื่องระบุตำแหน่ง
1、 หลักการพื้นฐานของการวางตำแหน่งจากด้านข้างของชิ้นงาน
เมื่อวางตำแหน่งจากด้านข้างของชิ้นงาน หลักการสามจุดถือเป็นหลักการพื้นฐานที่สุด เช่นเดียวกับส่วนรองรับซึ่งเป็นหลักการเดียวกับหลักการรองรับที่เรียกว่าหลักการสามจุด ซึ่งได้มาจากหลักการ "สามจุดที่ไม่อยู่ในเส้นเดียวกันกำหนดระนาบ"สามในสี่จุดสามารถกำหนดใบหน้าได้ ดังนั้นจึงสามารถกำหนดใบหน้าได้ทั้งหมดสี่หน้าอย่างไรก็ตามไม่ว่าจะหาตำแหน่งอย่างไรก็ค่อนข้างยากที่จะทำจุดที่สี่ในระนาบเดียวกัน

▲ หลักการสามจุด
ตัวอย่างเช่น เมื่อใช้ตัวกำหนดตำแหน่งความสูงคงที่ 4 จุด มีเพียง 3 จุดในที่เดียวเท่านั้นที่สามารถติดต่อชิ้นงานได้ และอีก 4 จุดที่เหลือก็มีแนวโน้มมากที่จะไม่สัมผัสกับชิ้นงาน
ดังนั้นเมื่อกำหนดค่าตัวกำหนดตำแหน่ง โดยทั่วไปจะขึ้นอยู่กับจุดสามจุด และระยะห่างระหว่างจุดทั้งสามนี้ควรเพิ่มขึ้นให้มากที่สุด
นอกจากนี้ เมื่อกำหนดค่าตัวกำหนดตำแหน่ง จำเป็นต้องยืนยันทิศทางของโหลดการประมวลผลที่ใช้ล่วงหน้าทิศทางของโหลดการประมวลผลยังเป็นทิศทางของด้ามจับเครื่องมือ/การเคลื่อนที่ของเครื่องมือด้วยตัวกำหนดตำแหน่งได้รับการกำหนดค่าที่ส่วนท้ายของทิศทางการป้อน ซึ่งอาจส่งผลโดยตรงต่อความแม่นยำโดยรวมของชิ้นงาน
โดยทั่วไป ตัวกำหนดตำแหน่งแบบปรับได้แบบโบลต์จะใช้สำหรับการวางตำแหน่งพื้นผิวว่างของชิ้นงาน และแบบคงที่ (ชิ้นส่วนกลึง CNCพื้นผิวสัมผัสเป็นพื้น) ตัวกำหนดตำแหน่งใช้สำหรับวางตำแหน่งพื้นผิวการตัดเฉือนของชิ้นงาน
2、 หลักการพื้นฐานของการวางตำแหน่งจากรูชิ้นงาน
เมื่อใช้รูที่ประมวลผลในกระบวนการก่อนหน้าของชิ้นงานในการวางตำแหน่ง จำเป็นต้องใช้พินพิกัดความเผื่อในการวางตำแหน่งด้วยการจับคู่ความแม่นยำของรูชิ้นงานกับความแม่นยำของโปรไฟล์พิน และการรวมเข้าด้วยกันตามพิกัดความเผื่อที่พอดี ความแม่นยำของตำแหน่งจึงสามารถตอบสนองความต้องการที่แท้จริงได้
นอกจากนี้ เมื่อใช้พินในการวางตำแหน่ง โดยทั่วไปจะใช้พินตรง ส่วนอีกอันใช้พินเพชร ดังนั้นการประกอบและถอดชิ้นส่วนจะสะดวกกว่าชิ้นงานจะติดหมุดได้ยาก
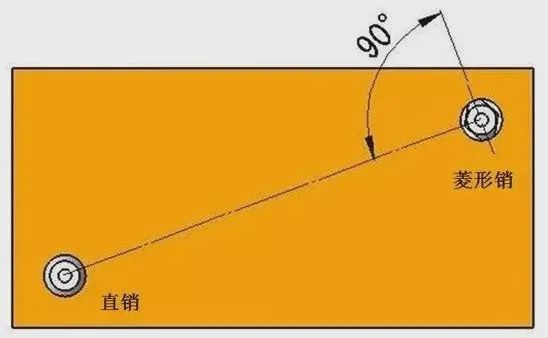
▲ การวางตำแหน่งด้วยพิน
แน่นอนว่าคุณสามารถใช้หมุดตรงสำหรับหมุดทั้งสองได้โดยการปรับพิกัดความเผื่อความพอดีเพื่อการวางตำแหน่งที่แม่นยำยิ่งขึ้น การใช้หมุดตรงและหมุดเพชรมักจะมีประสิทธิภาพมากที่สุด
เมื่อใช้หมุดตรงและหมุดเพชร เส้นเชื่อมต่อในทิศทางการกำหนดค่า (โดยที่หมุดเพชรสัมผัสกับชิ้นงาน) ของหมุดเพชรมักจะตั้งฉาก 90 °กับเส้นเชื่อมต่อระหว่างหมุดตรงและหมุดเพชรการกำหนดค่านี้มีไว้สำหรับการวางตำแหน่งเชิงมุม (ทิศทางการหมุนของชิ้นงาน)
ความรู้ที่เกี่ยวข้องเกี่ยวกับแคลมป์
1、 การจำแนกประเภทของมือจับ
ตามทิศทางการหนีบ โดยทั่วไปจะแบ่งออกเป็นประเภทต่างๆ ดังต่อไปนี้:
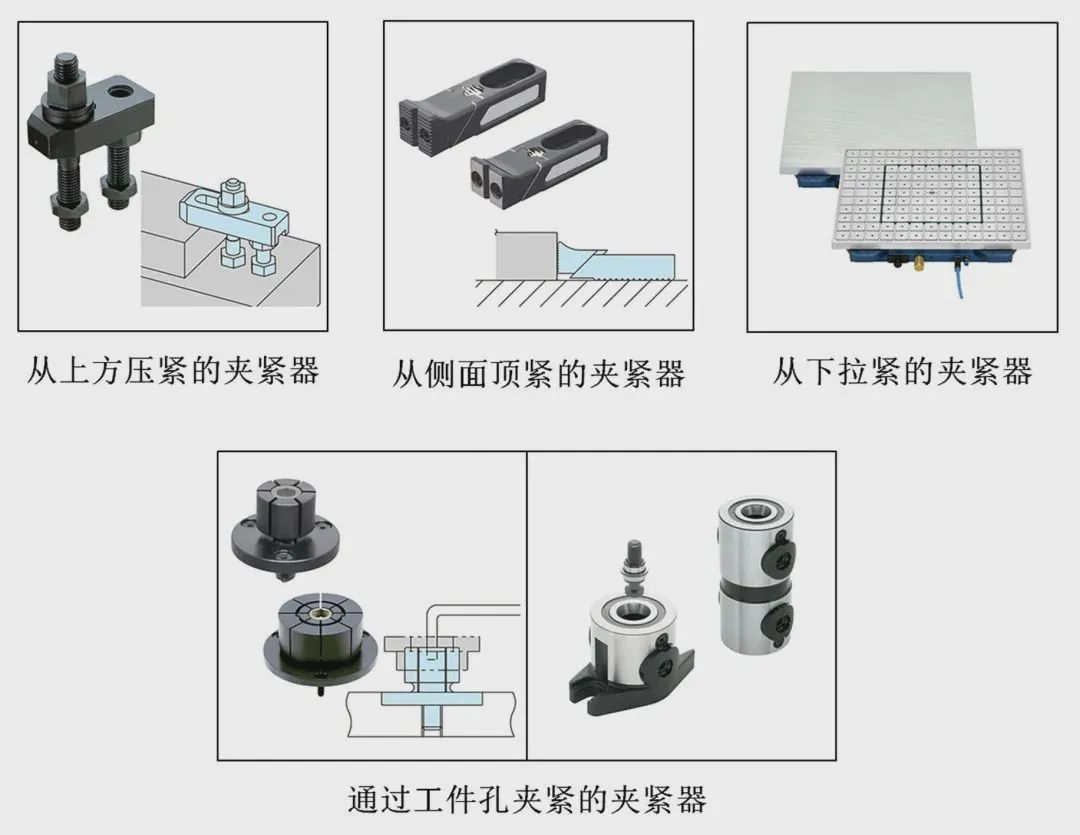
ต่อไปเรามาดูลักษณะของแคลมป์ต่างๆกัน
1. แคลมป์กดจากด้านบน
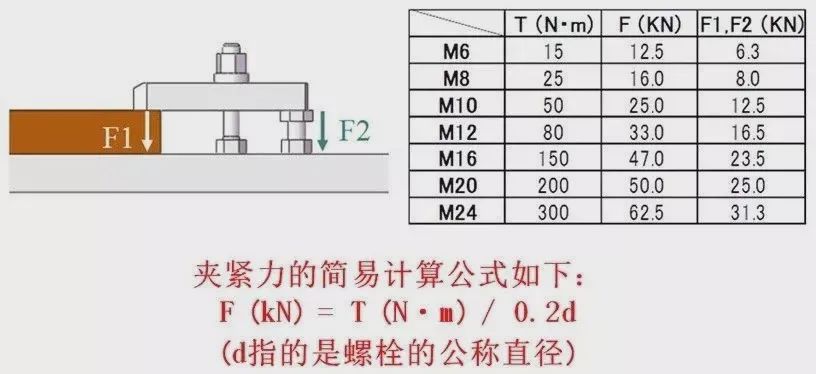
อุปกรณ์จับยึดที่ถูกกดจากด้านบนของชิ้นงานมีการเสียรูปน้อยที่สุดในระหว่างการจับยึด และมีเสถียรภาพมากที่สุดในระหว่างการประมวลผลชิ้นงานดังนั้นโดยทั่วไปแล้ว ข้อพิจารณาอันดับแรกคือการหนีบจากด้านบนของชิ้นงานฟิกซ์เจอร์ที่ใช้บ่อยที่สุดสำหรับการกดจากด้านบนของชิ้นงานคือฟิกซ์เจอร์เชิงกลแบบแมนนวลตัวอย่างเช่น รูปต่อไปนี้เรียกว่าแคลมป์ "แบบใบหลวม"แคลมป์ที่รวมกันโดยการกดแผ่น สลักเกลียว แม่แรง และน็อต เรียกว่าแคลมป์ "ใบหลวม"
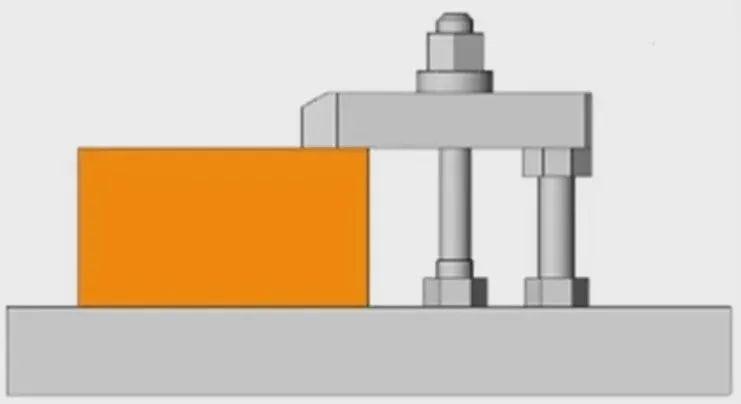
นอกจากนี้ยังสามารถเลือกแผ่นกดที่มีรูปร่างต่างกันได้ตามรูปร่างของชิ้นงานอีกด้วยเช่นชิ้นส่วนเครื่องจักรกลซีเอ็นซี, ชิ้นส่วนงานกลึงและชิ้นส่วนงานกัด
ความสัมพันธ์ระหว่างแรงบิดและแรงจับยึดของแคลมป์ชนิดใบหลวมสามารถคำนวณได้จากแรงผลักของสลักเกลียว
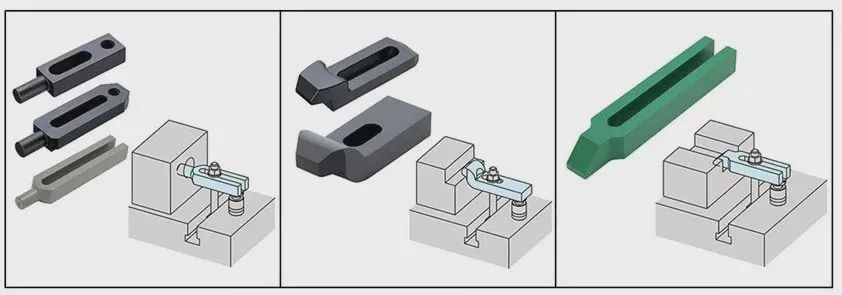
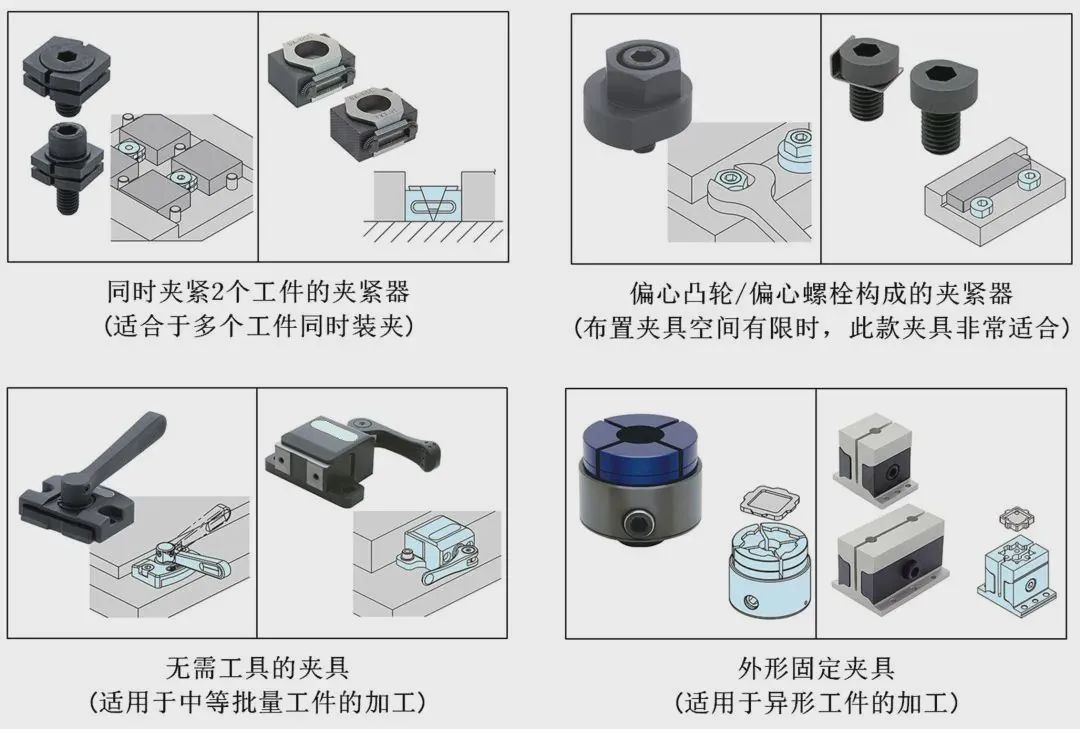
นอกจากแคลมป์ใบหลวมแล้ว ยังมีแคลมป์ที่คล้ายกันต่อไปนี้สำหรับยึดจากด้านบนของชิ้นงานอีกด้วย

2. แคลมป์หนีบจากด้านข้าง
เดิมทีวิธีการหนีบของการหนีบชิ้นงานจากด้านบนจะมีความเสถียรที่สุดในด้านความแม่นยำและเป็นค่าต่ำสุดในการประมวลผลของชิ้นงานอย่างไรก็ตาม เมื่อจำเป็นต้องดำเนินการเหนือชิ้นงาน หรือไม่เหมาะที่จะแคลมป์จากด้านบนของชิ้นงาน ซึ่งทำให้ไม่สามารถแคลมป์จากด้านบนของชิ้นงานได้ คุณสามารถเลือกแคลมป์จากด้านข้างของชิ้นงานได้อย่างไรก็ตาม เมื่อเปรียบเทียบชิ้นงานแล้ว เมื่อจับชิ้นงานจากด้านข้าง จะทำให้เกิดแรงลอยตัวต้องคำนึงถึงวิธีกำจัดแรงนี้เมื่อออกแบบฟิกซ์เจอร์

ดังแสดงในรูปด้านบน แคลมป์ด้านข้างยังมีแรงเฉียงลงขณะสร้างแรงผลักดัน ซึ่งสามารถป้องกันไม่ให้ชิ้นงานลอยขึ้นได้อย่างมีประสิทธิภาพ
แคลมป์ที่แคลมป์จากด้านข้างก็มีแคลมป์ที่คล้ายกันดังต่อไปนี้
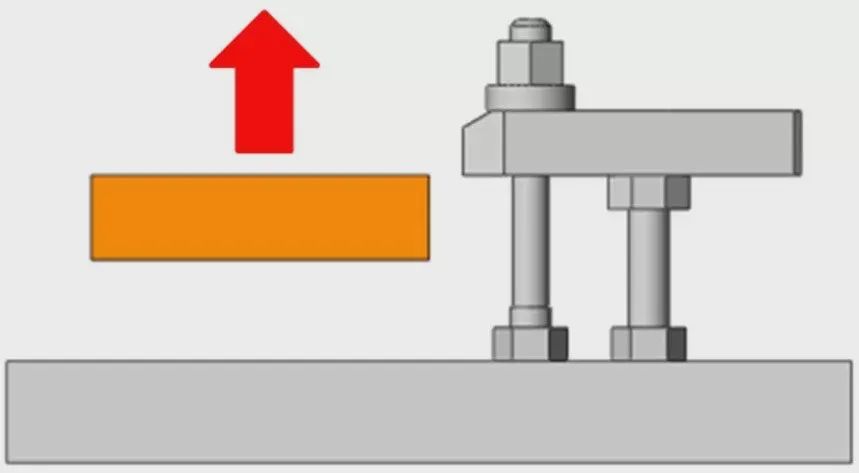
3.อุปกรณ์จับยึดเพื่อกระชับชิ้นงานจากการดึงลง
เมื่อตัดเฉือนพื้นผิวด้านบนของชิ้นงานแผ่นบาง ไม่เพียงแต่เป็นไปไม่ได้ที่จะจับยึดจากด้านบนเท่านั้น แต่ยังไม่มีเหตุผลที่จะบีบอัดจากด้านข้างอีกด้วยวิธีการจับยึดที่สมเหตุสมผลวิธีเดียวคือการขันชิ้นงานให้แน่นจากด้านล่างเมื่อชิ้นงานถูกดึงจากด้านล่าง หากทำจากเหล็ก ก็มักจะใช้แคลมป์ชนิดแม่เหล็กได้สำหรับชิ้นงานโลหะที่ไม่ใช่เหล็ก โดยทั่วไปสามารถใช้ถ้วยดูดสุญญากาศเพื่อปรับความตึงได้
ในสองกรณีข้างต้น แรงจับยึดจะแปรผันตามพื้นที่สัมผัสระหว่างชิ้นงานกับแม่เหล็กหรือหัวจับสุญญากาศหากโหลดการประมวลผลมีขนาดใหญ่เกินไปเมื่อประมวลผลชิ้นงานขนาดเล็ก ผลการประมวลผลจะไม่เหมาะ
นอกจากนี้ เมื่อใช้แม่เหล็กหรือตัวดูดสุญญากาศ พื้นผิวสัมผัสด้วยแม่เหล็กและตัวดูดสุญญากาศจะต้องมีความเรียบในระดับหนึ่งก่อนจึงจะสามารถใช้งานได้อย่างปลอดภัยและเป็นปกติ
4. อุปกรณ์จับยึดแบบมีรู
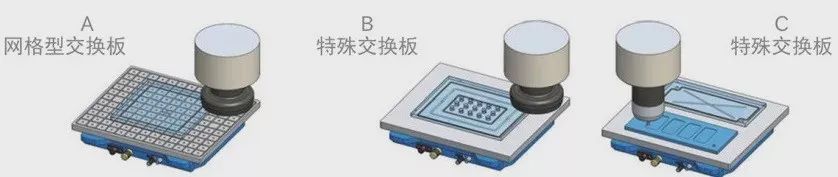
เมื่อใช้เครื่องจักร 5 แกนในการประมวลผลหลายหน้าในเวลาเดียวกันหรือการประมวลผลแม่พิมพ์ เพื่อป้องกันผลกระทบของฟิกซ์เจอร์และเครื่องมือในการประมวลผล โดยทั่วไปแล้วจะเหมาะสมที่จะใช้วิธีการจับยึดรูเมื่อเปรียบเทียบกับวิธีการจับยึดจากด้านบนและด้านข้างของชิ้นงาน วิธีการจับยึดรูจะมีภาระบนชิ้นงานน้อยกว่าและสามารถทำให้ชิ้นงานเสียรูปได้อย่างมีประสิทธิภาพ
▲ การประมวลผลโดยตรงแบบมีรู

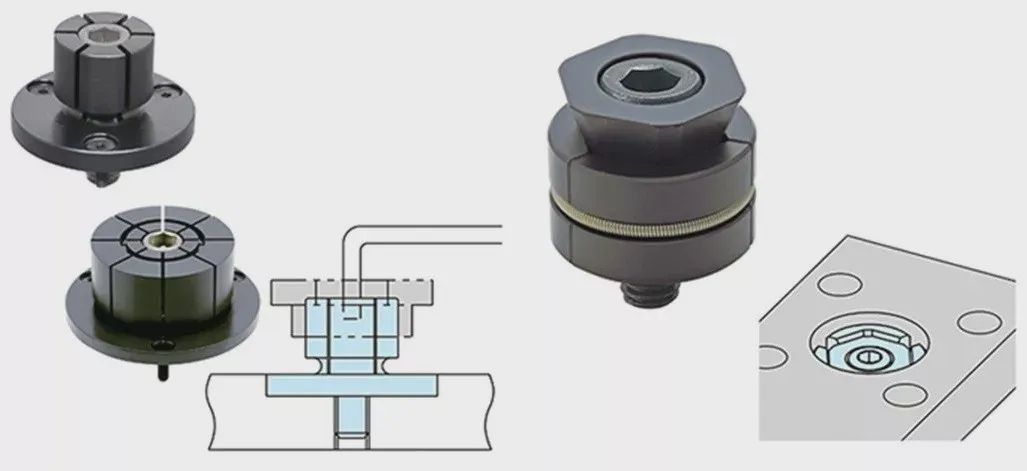
▲ ติดตั้งรีเวทสำหรับหนีบ
2、 การหนีบล่วงหน้า
ข้อมูลข้างต้นเกี่ยวข้องกับฟิกซ์เจอร์จับยึดของชิ้นงานเป็นหลักวิธีปรับปรุงความสามารถในการทำงานและการใช้การจับยึดล่วงหน้าก็มีความสำคัญเช่นกันเมื่อวางชิ้นงานในแนวตั้งบนฐาน ชิ้นงานจะหล่นลงเนื่องจากแรงโน้มถ่วงในเวลานี้ จะต้องใช้งานมือจับในขณะที่จับชิ้นงานด้วยมือ
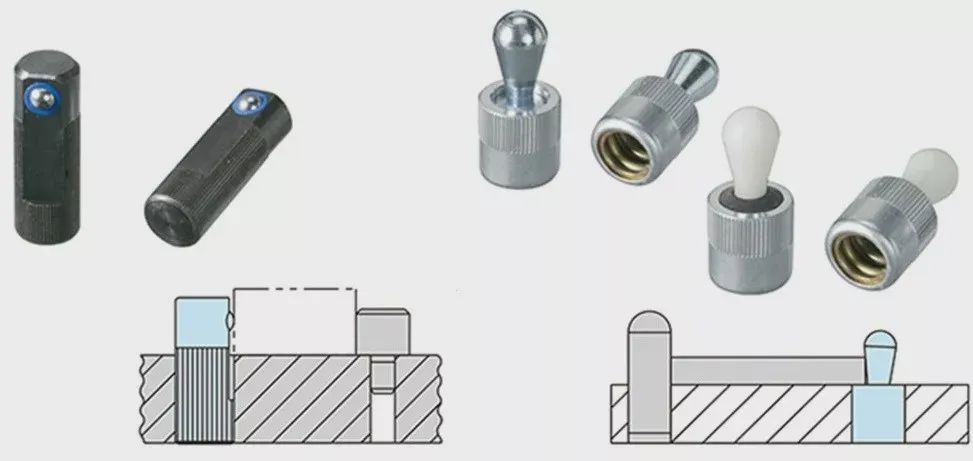
▲ การหนีบล่วงหน้า
หากชิ้นงานมีน้ำหนักมากหรือส่วนใหญ่ถูกจับยึดพร้อมๆ กัน ความสามารถในการทำงานจะลดลงอย่างมาก และระยะเวลาในการจับยึดจะยาวนานมากในเวลานี้ การใช้ผลิตภัณฑ์ก่อนการยึดจับแบบสปริงช่วยให้ชิ้นงานใช้งานมือจับในสถานะที่อยู่นิ่งได้ ซึ่งช่วยเพิ่มความสามารถในการทำงานอย่างมาก และลดเวลาในการจับยึดของชิ้นงานได้
3、 ข้อควรระวังในการเลือกกริปเปอร์
เมื่อใช้แคลมป์หลายประเภทในเครื่องมือเดียวกัน เครื่องมือสำหรับแคลมป์และคลายจะต้องรวมเป็นหนึ่งเดียวตัวอย่างเช่น ดังแสดงในรูปด้านซ้าย เมื่อใช้ประแจเครื่องมือหลายแบบในการจับยึด ภาระโดยรวมของผู้ปฏิบัติงานจะมีมากขึ้น และเวลาจับยึดโดยรวมของชิ้นงานก็จะนานขึ้นเช่นกันตัวอย่างเช่น ในภาพด้านขวาด้านล่าง ประแจเครื่องมือและขนาดสลักเกลียวจะรวมกันเป็นหนึ่งเดียวเพื่ออำนวยความสะดวกแก่ผู้ปฏิบัติงานภาคสนาม
▲ ความสามารถในการจับยึดชิ้นงาน
นอกจากนี้ เมื่อกำหนดค่ามือจับ จำเป็นต้องคำนึงถึงความสามารถในการทำงานของการจับยึดชิ้นงานให้มากที่สุดหากจำเป็นต้องเอียงชิ้นงานระหว่างการจับยึด การทำงานจะไม่สะดวกอย่างมากจำเป็นต้องหลีกเลี่ยงสถานการณ์นี้เมื่อออกแบบฟิกซ์เจอร์
เวลาโพสต์: 24 ต.ค. 2022