
Чи знаєте ви, скільки існує способів точного налаштування інструменту на токарних верстатах з ЧПК?
Метод сенсорного щупа: - У цьому методі використовується зонд, який торкається інструменту, щоб виміряти його положення відносно контрольної точки машини.Він дає точні дані про діаметр і довжину інструменту.
Інструмент попереднього налаштування:Пристосування для попереднього налаштування інструменту використовується для вимірювання розмірів інструменту поза верстатом.Цей спосіб дозволяє швидко і точно налаштувати інструмент.
Метод корекції інструменту:– У цьому методі оператор вимірює довжину та діаметр інструменту за допомогою таких інструментів, як штангенциркуль і мікрометр.Потім значення вводяться в систему керування машини.
Вимірювання лазерним інструментом:Лазерні системи використовуються для встановлення та вимірювання розмірів інструменту.Проектуючи промінь лазерного світла на ріжучу кромку інструмента, вони надають точні та швидкі дані про інструмент.
Метод розпізнавання зображення:Сучасні комп’ютерні системи можуть використовувати технологію розпізнавання зображень для автоматичного розрахунку розмірів інструменту.Вони роблять це, роблячи зображення інструменту, аналізуючи його характеристики, а потім обчислюючи вимірювання.
Це дуже корисна стаття.У статті спочатку представлені принципи та ідеї, що лежать в основі «методи налаштування інструменту пробного різання», який зазвичай використовується на токарних верстатах з ЧПК.Потім представлено чотири ручні методи пробного налаштування ріжучого інструменту для токарних систем з ЧПК.Щоб підвищити точність налаштувань інструменту, був розроблений програмно-керований автоматичний пробний метод різання на основі «автоматичного різання – вимірювання – компенсації помилок».Також було підсумовано чотири точні методи налаштування інструменту.
1. Принцип та ідеї методу налаштування інструменту для токарних верстатів з ЧПК
Розуміння принципів налаштування інструменту на токарному верстаті з ЧПУ є важливим для операторів, які хочуть зберегти чіткі уявлення про налаштування інструменту, освоїти операції налаштування інструменту та пропонувати нові методи.Настроювання інструменту – це визначення початкового положення системи координат заготовки, яке змінюється при програмуванні системи координат верстата.Налаштування інструменту передбачає отримання координат верстата для початкової точки контрольної програми інструменту та визначення корекції інструменту відносно цього інструменту.
Наступні умовні позначення використовуються для демонстрації концепцій та ідей налаштування інструменту за допомогою методу пробного різання.Використовуйте Hua Medieval Star Teaching Turning System (номер версії 5.30 програмного забезпечення);використовуйте центр правого торця деталі для початку програми та встановіть його за допомогою команди G92.Програмування діаметра, координати заготовки початкової точки H програми дорівнюють (100,50);встановіть чотири інструменти на тримач інструментів.Інструмент № 1 – це інструмент для грубого точіння на 90 градусів, а інструмент № 2 – це інструмент для точного точіння поза колом на 90 градусів.ніж, № №. 4-й ніж — трикутний різьбовий ніж з кутом 60 градусів (приклади в статті однакові).
Для налаштування інструменту використовуються координати «верстата».Як показано на малюнку 1, еталонний інструмент «вручну перевіряє зовнішнє коло та торець заготовки та записує координати верстата XZ на дисплеї.Координати верстата для початкової точки програми O виводяться із співвідношення між координатами верстата в точках A і O: XO=XA – Phd, ZO=ZA.Використовуючи координати деталі для H відносно точки O (100,50), ми можемо остаточно отримати координати верстата для точки H: XH=100 – Phd, ZH=ZA+50.Ця система координат заготовки базується на положенні вістря інструмента на контрольному інструменті.
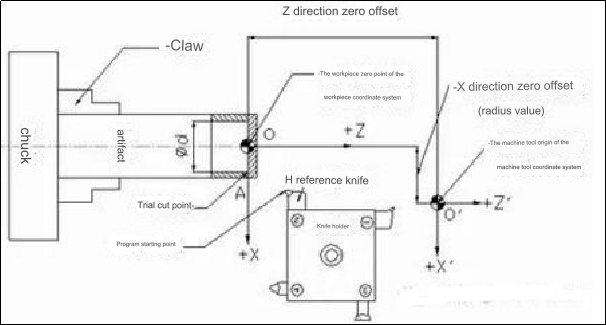
Малюнок 1. Схематична діаграма для ручного пробного різання та налаштування інструменту
На малюнку 2 зсув між точкою A та наконечником інструменту B виникає через різницю в розширеннях і положеннях у напрямку X та Z інструментів, затиснутих у тримачі інструментів.Вихідна система координат заготовки більше не діє.Кожен інструмент також зношується з різною швидкістю під час використання.Таким чином, корекція інструменту та значення зносу для кожного інструменту повинні бути компенсовані.
Щоб визначити зсув інструмента, кожен інструмент має бути вирівняний за певною контрольною точкою (точка A або B на малюнку 1) на заготовці.ЕПТ відображає координати верстата, які відрізняються від корекції інструменту нереферентних інструментів.Тому вони розташовані в одній точці.Використовуючи обчислення вручну або програмне забезпечення, координати верстата віднімаються з координат еталонного інструменту.Потім для кожного нестандартного пристрою розраховується корекція інструменту.
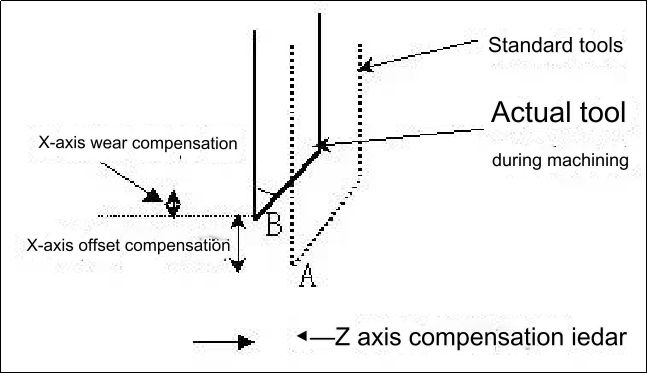
Малюнок 2. Компенсація корекції та зносу інструменту
Точність ручного пробного налаштування ріжучого інструменту обмежена.Це відомо як груба обробка.Як показано на малюнку 3, для досягнення більш точних результатів у межах припусків на обробкуавтозапчастини з ЧПУможна розробити просту автоматизовану пробну програму різання.Еталонний ніж постійно модифікується з використанням концепції «автоматичного різання-вимірювання-компенсації помилок».Корекція інструменту та початкова точка програми нееталонного інструменту використовуються, щоб переконатися, що різниця між значенням інструкції обробки та фактичним виміряним значенням відповідає вимогам точності.Точна настройка інструменту - це настройка інструменту, яка відбувається на цьому етапі.
Зазвичай виправляти нестандартні зміщення після початкової корекції.Це пояснюється тим, що забезпечення точного положення вихідної точки опорного інструменту є необхідною умовою для точних корекції інструменту.
Цей базовий процес налаштування інструменту досягається шляхом поєднання цих двох етапів: вручну виконайте пробний розріз ножа з еталоном, щоб отримати координати верстата для еталонного налаштування інструменту.– Обчисліть або автоматично обчисліть корекції інструменту для кожного нееталонного інструменту.– Еталонний ніж розташований приблизно на початку програми.– Еталонний ніж повторно викликає тестову програму різання.Тримач інструменту буде переміщено в режимі MDI або покрокового режиму, щоб компенсувати помилки та виправити положення початкової точки.Після вимірювання розміру неосновний ніж буде кілька разів викликати програму тестового різання.Зміщення інструменту коригується на основі цього зміщення.Це означає, що еталонний інструмент буде нерухомим під час точного запуску програми.
Малюнок 3. Схематична діаграма налаштування інструменту для пробного різання кількома ножами
Огляд грубої техніки постановки ножа
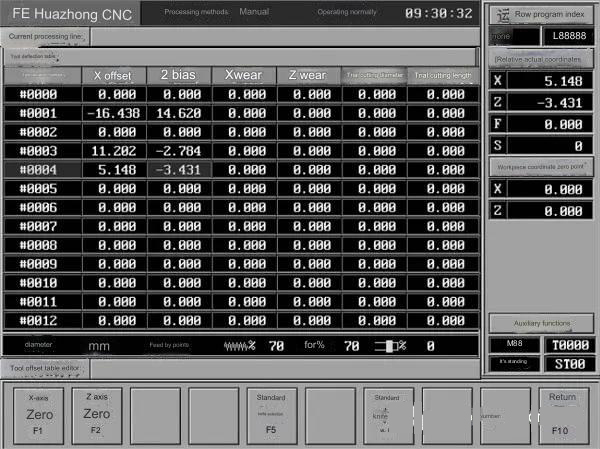
Щоб підготуватися до налаштування інструменту, ви можете скористатися будь-яким із таких методів: натисніть клавішу F2 у підменю системного MDI, щоб отримати доступ до таблиці корекції інструменту.Використовуйте клавіші, щоб перемістити панель виділення в позицію з номером інструменту, що відповідає кожному інструменту, і натисніть кнопку F5.Змініть значення корекції X і Z номерів корекції інструмента #0000 і #0001, а потім натисніть клавішу F5.
1) Автоматично встановіть метод корекції інструменту, вибравши контрольний інструмент.
Етапи налаштування інструменту показані на малюнках 1 і 4.
Синю смугу, виділену клавішами, можна пересувати, щоб вирівняти корекція інструмента №0002 для еталонного інструменту № 2.Еталонний інструмент 2. Щоб встановити №2, натисніть клавішу F5.Інструмент 2 буде встановлено як інструмент за замовчуванням.
2) Виріжте зовнішнє коло еталонним інструментом і запишіть координати X верстата.Після втягування інструменту зупиніть верстат і виміряйте зовнішній діаметр сегмента вала.
3) Еталонна лопатка повертається в точку А, зафіксовану методом «джог+крок».Введіть PhD і нуль у стовпці для діаметра різання випробування та довжини різання випробування відповідно.
4) Витягніть стандартний інструмент і виберіть номер нестандартного інструменту.Потім змініть інструмент вручну.Підказку для кожного нестандартного інструменту необхідно візуально вирівняти з точкою А за допомогою методу «біг + крок».Відрегулюйте відповідне зміщення після візуального вирівнювання інструменту.Якщо ви введете нуль і PhD у стовпцях для пробної довжини та діаметра різу, зміщення ножа всіх нереференсних ножів автоматично відображатимуться в стовпцях X offset і Z offset.
5) Коли довідковий інструмент повернеться до точки A, MDI запустить «G91 G00/або» G01 X[100 PhD] Z50, щоб перейти до початкової точки програми.
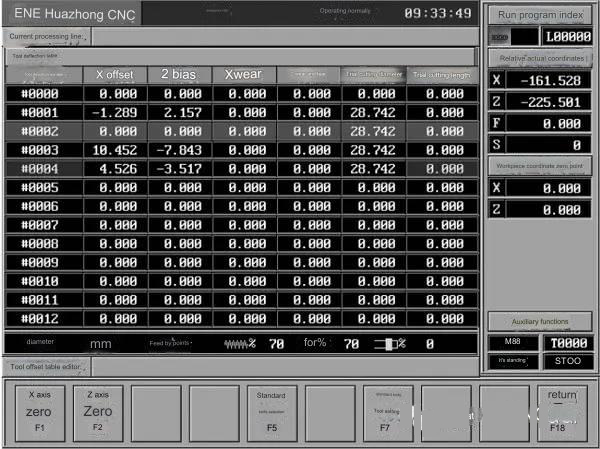
Рисунок 4. Принципова діаграма еталонного інструменту, що автоматично встановлює корекцію інструмента для стандартного інструменту
2. Встановіть координати опорного інструменту на нуль у контрольній точці встановлення інструменту та автоматично відобразіть метод корекції інструменту
Як показано на рисунках 1 і 5, етапи налаштування інструменту такі:
1) Те саме, що крок (2) вище.
2) Еталонний ніж повертається до пробної точки різання A за допомогою методу «біг + крок» відповідно до записаного значення.
3) В інтерфейсі, показаному на малюнку 4, натисніть клавішу F1, щоб «встановити вісь X на нуль», і натисніть клавішу F2, щоб «встановити вісь Z на нуль».Тоді «відносні фактичні координати», які відображає CRT, є (0, 0).
4) Вручну змініть нееталонний інструмент так, щоб його вістря інструмента було візуально вирівняно з точкою A. У цей час значення «відносних фактичних координат», що відображається на ЕПТ, є зміщенням інструмента відносно контрольного інструменту.Використовуйте клавіші ▲ та , щоб перемістити синій колір. Виділіть номер корекції інструменту для інструмента, що не є еталонним, запишіть його та введіть у відповідну позицію.
5) Те саме, що й попередній крок (5).
Малюнок 5. Схематична діаграма корекції інструмента, яка автоматично відображається, коли опорний інструмент встановлено на нуль у координатах опорних точок налаштування інструменту.
3. Метод зміщення ножа розраховується шляхом ручного розрахунку пробного різання декількома ножами зовнішнього кругового сегмента валу.
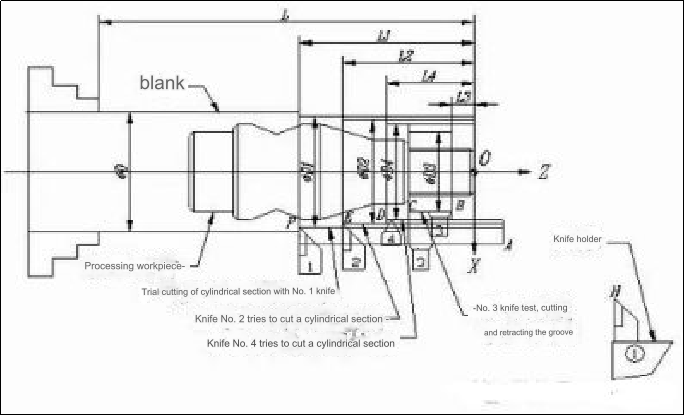
Як показано на малюнку 6, система вручну вирівнює ножі 1, 2 і 4 і вирізає вісь.Потім він записує координати машини для ріжучих кінців кожного ножа.(Точки F, D і E на малюнку 6).Виміряйте діаметр і довжину кожного сегмента.Замініть ріжучий ніж №1.Як показано на зображенні, виріжте заглиблення для інструменту.Вирівняйте ріжуче лезо з правим кінчиком, запишіть координати точки B і виміряйте L3 і PhD3, як показано на малюнку.Інкрементальне відношення координат між точками F, E і D для кожного інструменту та початковою точкою O можна визначити шляхом порівняння наведених вище даних.
Тоді можна побачити, що координати верстата становлять (X2-PhD2+100 і Z2-L2+50), а координати верстата для початкової точки програми відповідають контрольному інструменту.Методика розрахунку наведена в таблиці 1. У порожні поля введіть розраховані та записані значення.Примітка. Відстань пробного різання — це відстань між нульовою точкою координат заготовки та кінцевою точкою пробного різання в Z-напрямку.Позитивний і негативний напрямки визначаються віссю координат.
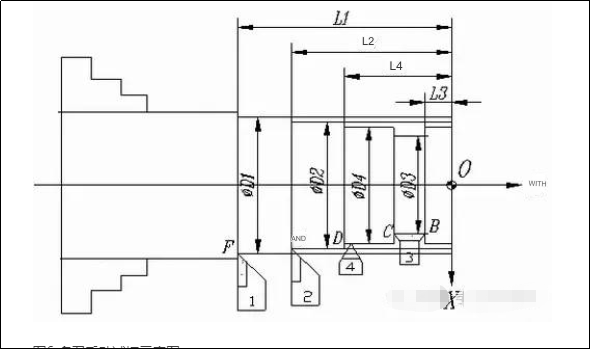
Рисунок 6 Принципова схема багатоножового ручного пробного різання
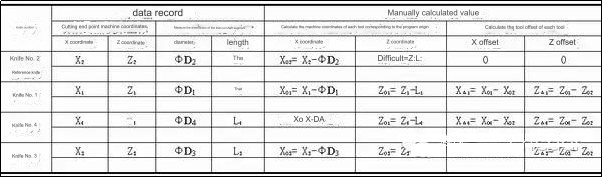
Таблиця 1 Розрахунок корекції інструменту для нестандартних інструментів
Цей метод дозволяє виконати просту процедуру тестового різання, оскільки він усуває необхідність візуального вирівнювання пробних точок різання.Однак зміщення ножа необхідно розраховувати вручну.Ви можете швидко розрахувати зсув інструмента, якщо роздрукувати аркуш із формулою, а потім заповнити пропуски.
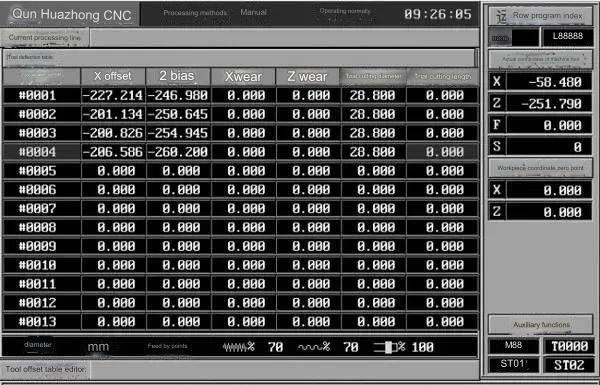
Рисунок 7. Схематична діаграма для автоматичного налаштування інструменту на системі ЧПК Century Star
Багатофункціональний метод автоматичного набору інструментів для системи ЧПК 4th Century Star
Усі згадані вище методи корекції інструменту є відносними.Після того, як професійний персонал виконає налаштування параметрів і тестування системи, HNC-21T дозволяє користувачам вибрати «метод абсолютного зсуву» під час налаштування інструментів.У програмуванні обробки абсолютне зміщення інструменту трохи відрізняється від методу відносного вимкнення інструменту.Немає необхідності використовувати G92 або G54 для систем координат заготовки, а також не потрібно скасовувати компенсацію інструменту.Для прикладу див. програму O1005.Як показано на малюнку 6, після того, як система повернеться до нуля, нехай кожен ніж спробує вручну розрізати секцію циліндра.
Після вимірювання довжини та діаметра заповніть значення корекції інструменту для кожного ножа.Пробна довжина різання вказана в колонці для пробного діаметра різання.Системне програмне забезпечення, використовуючи метод, описаний у «Багатоножовому різанні сегмента зовнішнього вала – ручний розрахунок для зміщення ножа», може автоматично розрахувати координати верстата для кожного ножа відповідно до походження програми.Цей спосіб налагодження інструменту є найшвидшим і особливо підходить для промислового виробництва.
Короткий опис п’яти методів точного налаштування інструменту
Принцип точного налаштування інструменту – «автоматичне вимірювання, автоматичне пробне різання та компенсація помилок».Компенсацію помилок можна розділити на дві категорії: для операцій MDI опорного інструменту або покрокових переміщень інструментів для компенсації початкової позиції програми;і для нестандартного інструменту, щоб компенсувати значення корекції або зносу інструменту.Щоб уникнути плутанини, таблиця 2 була розроблена для розрахунку та запису значень.
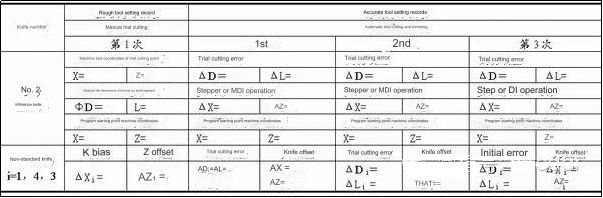
Таблиця 2 Таблиця записів про налаштування інструменту для пробного методу різання (Одиниці вимірювання: мм
1. Змініть метод корекції для кожного нестандартного інструменту після того, як контрольний інструмент виправив початкову точку.
Етапи налаштування інструменту показані на малюнку 3.
Після грубого калібрування інструменту еталонний інструмент має бути на початку програми.Введіть зміщення кожного нестандартного інструменту у відповідну позицію таблиці.
Використовуйте програму O1000 для обробки PhD2xL2, щоб зробити пробний розріз.
Потім виміряйте діаметр і довжину сегментованого ріжучого валу, порівняйте їх із значенням у програмі команд і визначте похибку.
Змініть початкову точку програми, якщо значення помилки MDI або рух кроку перевищує значення помилки MDI.
5) Динамічно змініть значення команди O1000 на основі виміряних розмірів і збережіть програму.Повторюйте кроки (2), поки початкове положення еталонного інструменту не буде в межах діапазону точності.Зверніть увагу на координати верстата для початкової точки виправленої програми.Встановіть координати на нуль.
6) Наберіть O1001 (ніж № 1, № O1002 (ніж № 3) для кожного пробного розрізу та виміряйте довжину Li (i=1, 2, 3) і діаметр PhDi кожної секції.
7) Виконайте компенсацію помилок за методом таблиці 3.
Повторюйте кроки з 6 по 7, доки помилки обробки не будуть у діапазоні точності, а еталонний інструмент не зупиниться в початковій точці програми та не рухатиметься.
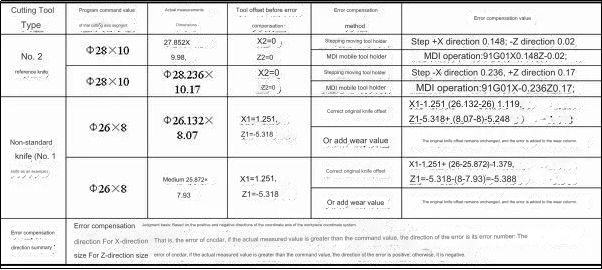
Таблиця 3 Приклад компенсації похибок для автоматичного пробного різання циліндричних сегментів валу (одиниця: мм).
2. Зміна вихідного положення кожного інструменту окремо
Принцип налаштування інструментів цього методу полягає в тому, що кожен інструмент налаштовує свою початкову програмну точку, таким чином опосередковано вирівнюючи з тією самою початковою позицією.
Етапи налаштування інструменту показані на малюнку 3.
Після грубого калібрування інструменту номер. Після грубого калібрування інструменту та запису зсувів еталонний інструмент № 2 має бути на початку програми.
Етапи з 2) по (5) першого методу точного налаштування інструменту ідентичні.
Використовуйте програму O1000 для виконання пробного різання.Виміряйте довжину Li та діаметр PhDi кожної секції.
Інструмент крокового переміщення або тримач інструменту MDI компенсує помилки та регулює початкову точку програми кожного інструменту.
Повторюйте кроки (6), доки початкова позиція для кожного нестандартного інструменту програми не буде в межах дозволеного діапазону точності.
Доступ до таблиці корекції інструменту можна отримати, ввівши відносні координати, показані на ЕПТ, у стовпці зміщення X і Z, що відповідають номеру корекції інструменту.Цей спосіб зручний і простий.Цей спосіб простий і зручний.
3. Змініть усі методи корекції для нестандартних інструментів одразу після зміни початкової позиції довідкової програми інструменту.
Метод такий самий, як і перший метод точного налаштування інструменту.Єдина відмінність між ними полягає в тому, що на кроці 7 викликається програма O1003, яка одночасно викликає три ножі (O1004 видаляє No. Програма O1003 замінює розділ No. 2 обробки інструменту. Решта кроків ідентичні.
6. За допомогою цього методу можна відремонтувати одразу чотири ножі
Щоб визначити похибку обробки, виміряйте діаметр кожної секції, PhDi, і довжину кожної секції, Li (i=2, 1, 4), використовуючи метод відносного зміщення інструменту.Використовуйте MDI або поетапне переміщення до тримача інструменту для еталонного інструменту.Змініть початкову точку програми.Для нестандартних інструментів спочатку виправте зміщення за допомогою оригінального зміщення.Потім введіть нове зміщення.Помилка обробки для еталонного інструменту також повинна бути введена в стовпець зносу.Викличте програму пробного різання O1005, якщо для калібрування інструменту використовується абсолютне зміщення інструменту.Потім компенсуйте похибки обробки інструментів у стовпцях зносу відповідних номерів корекції інструменту.
Який вплив на якість має вибір правильного методу налаштування інструменту для токарних верстатів з ЧПКОбробка деталей з ЧПУ?
Точність і точність:
Ріжучі інструменти будуть правильно вирівняні, якщо інструмент налаштовано правильно.Це безпосередньо впливає на точність і точність операцій обробки.Неправильне налаштування інструменту може призвести до помилок у розмірах, поганої обробки поверхонь і навіть браку.
Консистенція:
Узгоджені налаштування інструменту забезпечують рівномірність операцій обробки та незмінну якість багатьох деталей.Це зменшує варіації в обробці поверхні та розмірах, а також допомагає підтримувати жорсткі допуски.
Термін служби інструменту та знос інструменту:
Забезпечуючи належне зачеплення інструменту з деталлю, правильне налаштування інструменту може максимізувати термін його служби.Неправильне налаштування інструменту може призвести до надмірного зносу та поломки інструменту, що зменшить термін служби інструменту.
Продуктивність і ефективність
Ефективні методи налаштування інструменту можуть скоротити час налаштування машини та збільшити час безвідмовної роботи.Це підвищує продуктивність за рахунок мінімізації часу простою та максимального збільшення часу різання.Це дозволяє швидше змінювати інструмент і скорочує загальний час обробки.
Безпека оператора
Вибір правильного методу налаштування інструменту може вплинути на безпеку оператора.Деякі методи, як-от розпізнавання зображень або вимірювання лазерним інструментом, усувають необхідність ручного поводження з інструментами, зменшуючи ймовірність травм.
Мета Anebon полягає в тому, щоб зрозуміти чудове спотворення від виробництва та надати найкращу підтримку вітчизняним та закордонним клієнтам від щирого серця для 2022 року. Високоякісна нержавіюча сталь, алюміній, високоточне виготовлення на замовлення.Токарна обробка з ЧПУ, фрезерування,запчастини для чпудля аерокосмічної галузі, щоб розширити наш міжнародний ринок, Anebon в основному постачає нашим закордонним клієнтам високоякісні механічні деталі, фрезеровані деталі та токарні послуги з ЧПУ.
Anebon підтримує дух «інновацій, гармонії, командної роботи та спільного використання, шляхів, прагматичного прогресу».Дайте нам шанс, і ми доведемо свою спроможність.З вашою люб'язною допомогою, компанія Anebon вірить, що ми зможемо разом з вами створити світле майбутнє.
Час публікації: 19 жовтня 2023 р