
Ці ведаеце вы, колькі метадаў існуе для дакладнай налады інструмента на такарных станках з ЧПУ?
Метад дотыку: - У гэтым метадзе выкарыстоўваецца зонд, які дакранаецца да інструмента, каб вымераць яго становішча адносна апорнай кропкі станка.Ён дае дакладныя дадзеныя аб дыяметры і даўжыні інструмента.
Інструмент папярэдняй налады:Прыстасаванне для папярэдняй налады інструмента выкарыстоўваецца для вымярэння памераў інструмента па-за станком.Гэты метад дазваляе хутка і дакладна наладзіць інструмент.
Метад зрушэння інструмента:– У гэтым метадзе аператар вымярае даўжыню і дыяметр інструмента з дапамогай такіх інструментаў, як суппорт і мікраметр.Затым значэнні ўводзяцца ў сістэму кіравання машыны.
Вымярэнне лазерным інструментам:Лазерныя сістэмы выкарыстоўваюцца для ўстаноўкі і вымярэння памераў інструмента.Праецыруючы прамень лазернага святла на рэжучую абзу інструмента, яны забяспечваюць дакладныя і хуткія дадзеныя інструмента.
Метад распазнання выявы:Прасунутыя камп'ютэрныя сістэмы могуць выкарыстоўваць тэхналогію распазнавання малюнкаў для аўтаматычнага разліку памераў інструмента.Яны робяць гэта, робячы выявы інструмента, аналізуючы яго характарыстыкі, а затым разлічваючы вымярэнні.
Гэта вельмі карысны артыкул.У артыкуле спачатку прадстаўлены прынцыпы і ідэі, якія ляжаць у аснове «метаду наладкі інструмента пробнай рэзкі», які звычайна выкарыстоўваецца для такарных станкоў з ЧПУ.Затым уводзіцца чатыры ручных метаду пробнай налады рэжучага інструмента для такарных сістэм з ЧПУ.Для павышэння дакладнасці налад інструмента быў распрацаваны праграмна-кіраваны метад аўтаматычнай пробнай рэзкі, заснаваны на «аўтаматычнай рэзцы – вымярэнні – кампенсацыі памылак».Таксама былі абагульнены чатыры метаду дакладнай налады інструмента.
1. Прынцып і ідэі метаду наладкі інструмента для такарных станкоў з ЧПУ
Разуменне прынцыпаў наладкі інструмента такарнага станка з ЧПУ важна для аператараў, якія жадаюць захаваць дакладнае ўяўленне аб наладзе інструмента, авалодаць аперацыямі наладкі інструмента і прапаноўваць новыя метады.Наладка інструмента - гэта вызначэнне пачатковага становішча сістэмы каардынат загатоўкі, якое змяняецца пры праграмаванні сістэмы каардынат станка.Настройка інструмента ўключае атрыманне каардынат станка для пачатковай кропкі эталоннай праграмы інструмента і вызначэнне зрушэння інструмента адносна гэтага інструмента.
Наступныя пагадненні выкарыстоўваюцца для дэманстрацыі канцэпцый і ідэй, якія ляжаць у аснове наладкі інструмента з выкарыстаннем пробнага метаду рэзкі.Выкарыстоўваць Hua Medieval Star Teaching Turning System (нумар версіі 5.30 прыкладнога праграмнага забеспячэння);выкарыстоўвайце цэнтр правага тарца нарыхтоўкі для пачатковай кропкі праграмы і ўсталюйце яе з дапамогай каманды G92.Праграмаванне дыяметра, каардынаты нарыхтоўкі пачатковай кропкі H праграмы (100,50);усталюйце чатыры інструмента на трымальнік.Інструмент № 1 з'яўляецца інструментам для чарнавога такарэння на 90 градусаў, а інструмент № 2 - гэта інструмент для дакладнага такарэння па вонкавым акружнасці на 90 градусаў.нож, № №. 4-ы нож - гэта трохкутны нож з разьбой пад вуглом 60 градусаў (прыклады ў артыкуле аднолькавыя).
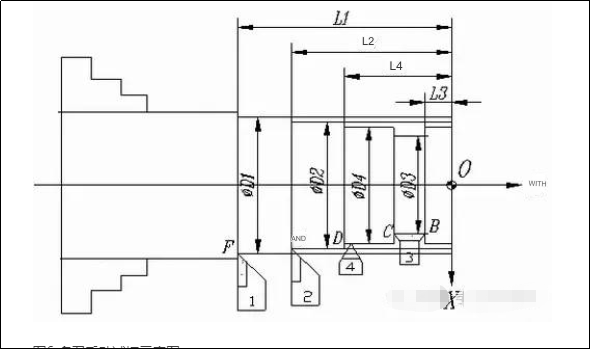
Для налады інструмента выкарыстоўваюцца каардынаты «станка».Як паказана на малюнку 1, эталонны інструмент «ўручную тэстава разразае вонкавую акружнасць і канец загатоўкі і запісвае каардынаты станка XZ на дысплей.Каардынаты станка для пачатковай праграмы O атрымліваюцца з залежнасці паміж каардынатамі станка ў кропках A і O: XO=XA – Phd, ZO=ZA.Выкарыстоўваючы каардынаты нарыхтоўкі для H адносна кропкі O (100,50), мы можам канчаткова атрымаць каардынаты станка для кропкі H: XH=100 – Phd, ZH=ZA+50.Гэтая сістэма каардынат нарыхтоўкі заснавана на становішчы наканечніка інструмента на эталонным інструменце.
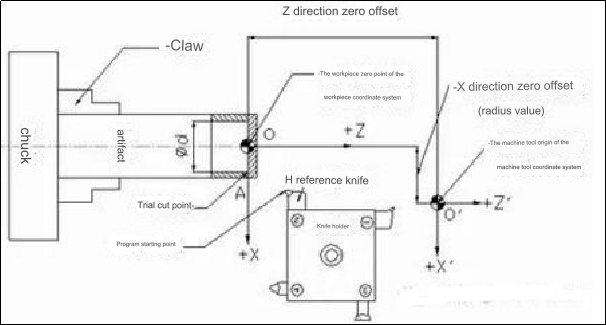
Малюнак 1. Прынцыповая дыяграма для ручной пробнай рэзкі і налады інструмента
На малюнку 2 зрушэнне паміж кропкай A і наканечнікам інструмента B адбываецца з-за розніцы ў пашырэннях і палажэннях у напрамках X і Z інструментаў, заціснутых у трымальніку інструмента.Зыходная сістэма каардынат для загатоўкі больш не дзейнічае.Кожны інструмент таксама будзе зношвацца з рознай хуткасцю падчас выкарыстання.Такім чынам, значэнні зрушэння інструмента і зносу для кожнага інструмента павінны быць кампенсаваны.
Каб вызначыць зрушэнне інструмента, кожны інструмент павінен быць выраўнаваны ў пэўнай кропцы адліку (кропка A або B на малюнку 1) на нарыхтоўцы.ЭПТ адлюстроўвае каардынаты станка, якія адрозніваюцца ад зрухаў інструментаў нерэферэнтных інструментаў.Такім чынам, яны размешчаны ў адной кропцы.Пры выкарыстанні ручных разлікаў або праграмных разлікаў каардынаты станка адымаюцца з каардынат эталоннага інструмента.Затым разлічваецца зрушэнне інструмента для кожнага нестандартнага прылады.
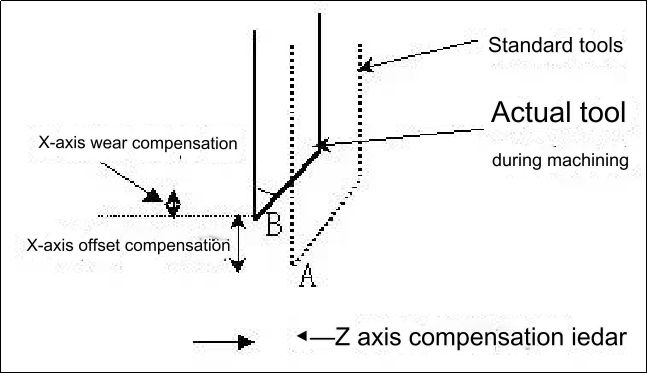
Малюнак 2. Кампенсацыя зрушэння і зносу інструмента
Дакладнасць ручной пробнай налады рэжучага інструмента абмежаваная.Гэта вядома як грубая апрацоўка інструментаў.Як паказана на малюнку 3, для дасягнення больш дакладных вынікаў у межах прыпуску на апрацоўкуаўтазапчасткі з ЧПУ, можна распрацаваць простую аўтаматызаваную пробную праграму рэзкі.Эталонны нож пастаянна мадыфікуецца з выкарыстаннем канцэпцыі «аўтаматычная кампенсацыя памылак рэзання-вымярэння».Зрушэнне інструмента і пачатковая кропка праграмы неэталоннага інструмента выкарыстоўваюцца, каб пераканацца, што розніца паміж значэннем інструкцыі па апрацоўцы і фактычным вымераным значэннем адпавядае патрабаванням дакладнасці.Прэцызійная налада інструмента - гэта налада інструмента, якая адбываецца на гэтым этапе.
Звычайна выпраўляюць нестандартныя зрушэнні пасля першапачатковай карэкцыі.Гэта адбываецца таму, што гарантаванне дакладнага становішча пачатковай кропкі эталоннага інструмента з'яўляецца неабходнай умовай для дакладных зрушэнняў інструмента.
Гэты асноўны працэс наладкі інструмента дасягаецца шляхам аб'яднання гэтых двух этапаў: уручную тэставы разрэз нажа з эталонам, каб атрымаць каардынаты станка для эталона налады інструмента.– Вылічыце або аўтаматычна вылічыце зрухі інструмента для кожнага неэталоннага інструмента.– Эталонны нож знаходзіцца прыкладна ў пачатку праграмы.– Эталонны нож паўторна выклікае праграму тэставай рэзкі.Трымальнік інструмента будзе перамяшчацца ў рэжыме MDI або пакрокавым рэжыме, каб кампенсаваць памылкі і выправіць становішча пачатковай кропкі.Пасля вымярэння памеру небазавы нож будзе некалькі разоў выклікаць праграму тэставай рэзкі.Зрушэнне інструмента карэктуецца на аснове гэтага зрушэння.Гэта азначае, што эталонны інструмент будзе нерухомы пры дакладным запуску праграмы.
Малюнак 3. Прынцыповая дыяграма наладкі інструмента для пробнай рэзкі з некалькімі нажамі
Агляд метадаў грубай пастаноўкі нажа
Каб падрыхтавацца да наладкі інструмента, вы можаце выкарыстоўваць любы з наступных метадаў: націсніце клавішу F2 у падменю сістэмнага MDI, каб атрымаць доступ да табліцы зрухаў інструмента.З дапамогай клавіш перамясціце панэль падсвятлення ў пазіцыю з нумарам інструмента, які адпавядае кожнаму інструменту, і націсніце кнопку F5.Змяніце значэнні зрушэння па X і Z нумароў зрушэння інструмента #0000 і #0001, затым націсніце клавішу F5.
1) Аўтаматычна ўсталяваць метад зрушэння інструмента, выбраўшы эталонны інструмент.
Этапы наладжвання інструмента паказаны на малюнках 1 і 4.
Сінюю паласу, вылучаную клавішамі, можна перамяшчаць, каб выраўнаваць зрушэнне інструмента № 0002 для эталоннага інструмента № 2.Даведачны інструмент 2. Каб усталяваць No.2, націсніце клавішу F5.Інструмент 2 будзе ўсталяваны ў якасці інструмента па змаўчанні.
2) Выражыце знешнюю акружнасць эталонным інструментам і адзначце каардынаты X станка.Пасля ўцягвання інструмента спыніце машыну і вымерайце вонкавы дыяметр сегмента вала.
3) Апорная лопасць вяртаецца ў кропку А, зафіксаваную метадам «бег+крок».Увядзіце PhD і нуль у слупкі для дыяметра рэзання тэсту і даўжыні рэзання тэсту адпаведна.
4) Выцягніце стандартны інструмент і выберыце нумар нестандартнага інструмента.Затым зменіце інструмент ўручную.Наканечнік для кожнага нестандартнага інструмента павінен быць візуальна сумешчаны з кропкай А метадам «бег + крок».Адрэгулюйце адпаведнае зрушэнне пасля візуальнага выраўноўвання інструмента.Калі вы ўвядзеце нуль і доктар філасофіі ў слупках для пробнай даўжыні і дыяметра рэзкі, зрухі нажоў усіх неэталонных нажоў будуць аўтаматычна адлюстроўвацца ў слупках зрушэння X і Z.
5) Пасля таго, як даведачны інструмент вернецца ў пункт А, MDI запусціць «G91 G00/або» G01 X[100 PhD] Z50, каб дабрацца да пачатковай кропкі праграмы.
Малюнак 4. Прынцыповая дыяграма эталоннага інструмента, які аўтаматычна ўсталёўвае зрушэнне інструмента для стандартнага інструмента
2. Усталюйце каардынаты эталоннага інструмента на нуль у кропцы адліку ўстаноўкі інструмента і аўтаматычна адлюструйце метад зрушэння інструмента
Як паказана на малюнках 1 і 5, этапы налады інструмента наступныя:
1) Тое самае, што і ў кроку (2) вышэй.
2) Эталонны нож вяртаецца да пробнай кропкі рэзання А метадам «бег трушком + крок» у адпаведнасці з запісаным значэннем.
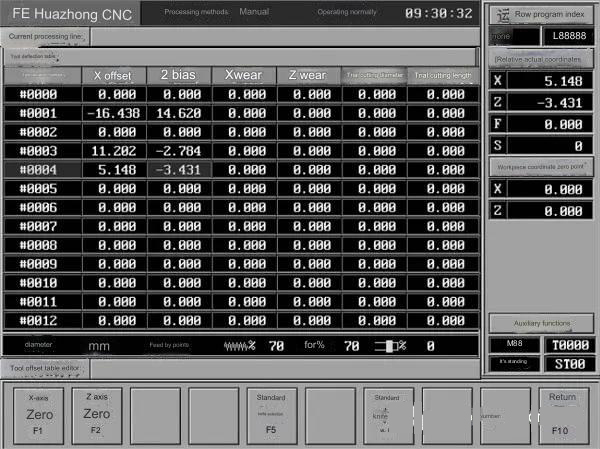
3) У інтэрфейсе, паказаным на малюнку 4, націсніце клавішу F1, каб «усталяваць вось X на нуль», і націсніце клавішу F2, каб «усталяваць вось Z на нуль».Тады «адносныя фактычныя каардынаты», якія адлюстроўвае ЭПТ, роўныя (0, 0).
4) Уручную змяніце неэталонны інструмент так, каб яго кончык інструмента быў візуальна выраўнаваны з кропкай А. У гэты час значэнне «адносных фактычных каардынат», якое адлюстроўваецца на ЭПТ, з'яўляецца зрушэннем інструмента адносна эталоннага інструмента.Выкарыстоўвайце клавішы ▲ і для перамяшчэння сіняга колеру. Вылучыце нумар зрушэння інструмента неэталоннага інструмента, запішыце яго і ўвядзіце ў адпаведную пазіцыю.
5) Тое ж, што і папярэдні крок (5).
Малюнак 5. Схематычная дыяграма зрушэння інструмента, якое аўтаматычна адлюстроўваецца, калі эталонны інструмент усталяваны на нуль у каардынатах апорных кропак налады інструмента.
3. Метад зрушэння нажа разлічваецца шляхам ручнога разліку пробнай рэзкі некалькімі нажамі вонкавага круглага сегмента вала.
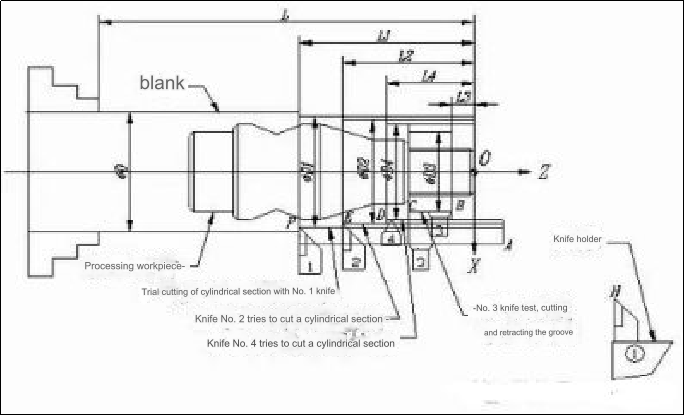
Як паказана на малюнку 6, сістэма ўручную выраўноўвае нажы 1, 2 і 4 і выразае вось.Затым ён запісвае каардынаты машыны для рэжучых канцоў кожнага нажа.(Кропкі F, D і E на малюнку 6).Вымерайце дыяметр і даўжыню кожнага сегмента.Заменіце рэжучы нож № 1.Як паказана на малюнку, выражыце паглыбленне інструмента.Выраўняйце рэжучае лязо з правым наканечнікам, запішыце каардынаты кропкі B і вымерайце L3 і PhD3, як паказана на малюнку.Дадатковую каардынатную залежнасць паміж кропкамі F, E і D для кожнага інструмента і пачатковай кропкай O можна вызначыць шляхам параўнання дадзеных вышэй.
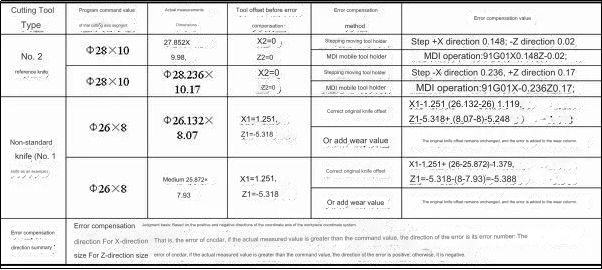
Тады можна ўбачыць, што каардынаты станка (X2-PhD2+100 і Z2-L2+50) і каардынаты станка для пачатковай кропкі праграмы адпавядаюць эталоннаму інструменту.Спосаб разліку паказаны ў табліцы 1. У пустыя радкі ўвядзіце разлічаныя і запісаныя значэнні.Заўвага: адлегласць пробнага рэзання - гэта адлегласць паміж нулявой кропкай каардынаты нарыхтоўкі і канчатковай кропкай пробнага рэзання ў напрамку Z.Дадатныя і адмоўныя напрамкі вызначаюцца воссю каардынат.
Малюнак 6. Прынцыповая схема шматнажовай ручной пробнай рэзкі
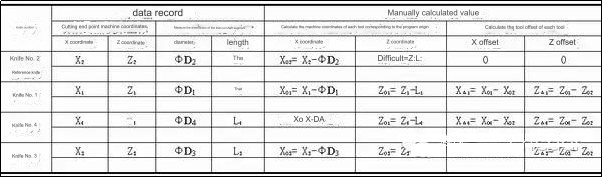
Табліца 1. Разлік карэкціроўкі інструмента для нестандартных інструментаў
Гэты метад дазваляе выканаць простую працэдуру пробнай рэзкі, паколькі пазбаўляе ад неабходнасці візуальнага выраўноўвання пробных кропак рэзкі.Аднак зрушэнне нажа трэба разлічваць ўручную.Вы можаце хутка разлічыць зрушэнне інструмента, калі раздрукуеце аркуш з формулай, а потым запоўніце прабелы.
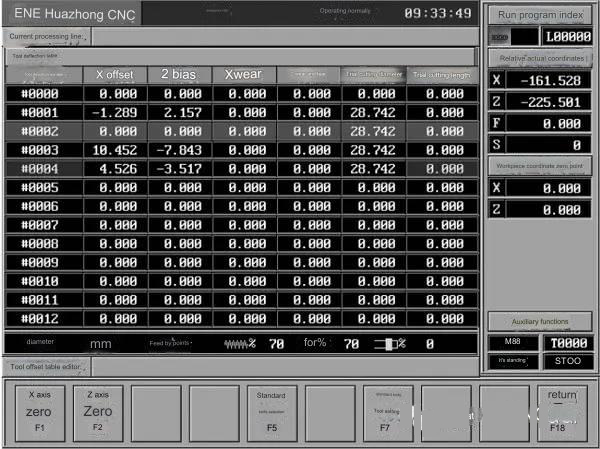
Малюнак 7. Прынцыповая дыяграма аўтаматычнай налады інструмента ў сістэме ЧПУ Century Star
Метад аўтаматычнага набору інструментаў для некалькіх інструментаў для сістэмы ЧПУ 4th Century Star
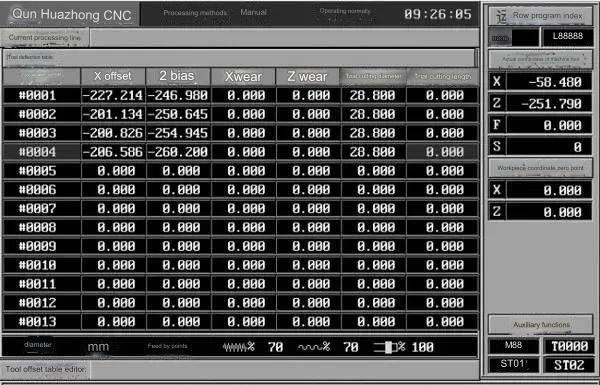
Усе вышэйзгаданыя метады зрушэння інструмента з'яўляюцца адноснымі метадамі.Пасля таго, як прафесійны персанал выканае наладу параметраў і тэставанне сістэмы, HNC-21T дазваляе карыстальнікам выбраць «метад абсалютнага зрушэння» пры наладзе інструментаў.Пры праграмаванні апрацоўкі абсалютнае зрушэнне інструмента трохі адрозніваецца ад адноснага метаду выключэння інструмента.Неабавязкова выкарыстоўваць G92 або G54 для сістэм каардынат нарыхтоўкі, а таксама адмяняць кампенсацыю інструмента.Глядзіце прыклад праграмы O1005.Як паказана на малюнку 6, пасля таго, як сістэма вернецца да нуля, дазвольце кожнаму нажу ўручную паспрабаваць выразаць частку цыліндру.
Запоўніце лічбы зрушэння інструмента для кожнага нажа пасля вымярэння даўжыні і дыяметра.Пробная даўжыня рэзкі паказана ў графе пробнага дыяметра рэзкі.Сістэмнае праграмнае забеспячэнне з выкарыстаннем метаду, апісанага ў раздзеле «Многанажовая рэзка вонкавага сегмента вала – ручной разлік для зрушэння нажа», можа аўтаматычна разлічыць каардынаты станка для кожнага нажа ў адпаведнасці з паходжаннем праграмы.Гэты спосаб налады інструмента з'яўляецца самым хуткім, і ён асабліва падыходзіць для прамысловай вытворчасці.
Рэзюмэ пяці метадаў дакладнай налады інструмента
Прынцып дакладнай налады інструмента - «аўтаматычнае вымярэнне, аўтаматычная пробная рэзка і кампенсацыя памылак».Кампенсацыю памылак можна падзяліць на дзве катэгорыі: для эталоннага інструмента працы MDI, або крокавыя перамяшчэння паведамленняў інструмента для кампенсацыі пачатковай пазіцыі праграмы;і для нестандартнага інструмента для кампенсацыі значэнняў зрушэння або зносу інструмента.Каб пазбегнуць блытаніны, табліца 2 была распрацавана для разліку і запісу значэнняў.
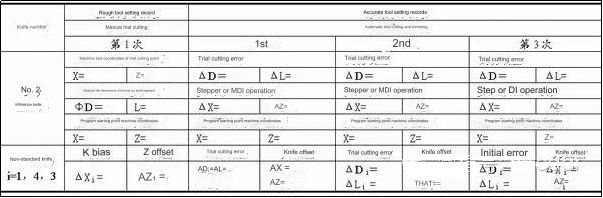
Табліца 2. Табліца запісаў налад інструмента для пробнага метаду рэзкі (Адзінка вымярэння: мм
1. Змяніце метад зрушэння для кожнага нестандартнага інструмента пасля таго, як эталонны інструмент адкарэктуе пачатковую кропку.
Этапы наладжвання інструмента паказаны на малюнку 3.
Пасля грубай каліброўкі інструмента эталонны інструмент павінен знаходзіцца ў пачатку праграмы.Увядзіце зрушэнне кожнага нестандартнага інструмента ў адпаведную пазіцыю табліцы.
Выкарыстоўвайце праграму O1000 для апрацоўкі PhD2xL2, каб зрабіць пробны выраз.
Затым вымерайце дыяметр і даўжыню сегментаванага рэжучага вала, параўнайце іх са значэннем у каманднай праграме і вызначыце хібнасць.
Змяніце пачатковую кропку праграмы, калі значэнне памылкі MDI або крок кроку больш, чым значэнне памылкі MDI.
5) Дынамічна змяніце значэнне каманды O1000 на аснове вымераных памераў і захавайце праграму.Паўтарайце крокі (2), пакуль пачатковае становішча эталоннага інструмента не апынецца ў дыяпазоне дакладнасці.Звярніце ўвагу на каардынаты станка для пачатковай кропкі выпраўленай праграмы.Усталюйце каардынаты на нуль.
6) Набярыце O1001 (нож № 1, № O1002 (нож № 3) для кожнага пробнага разрэзу і вымерайце даўжыню Li (i=1, 2, 3) і дыяметр PhDi кожнай секцыі.
7) Кампенсуйце памылкі метадам табліцы 3.
Паўтарайце крокі з 6 па 7, пакуль памылкі апрацоўкі не апынуцца ў межах дакладнасці, а эталонны інструмент не спыніцца ў пачатковай кропцы праграмы і не рухаецца.
Табліца 3. Прыклад кампенсацыі памылак для аўтаматычнай пробнай рэзкі цыліндрычных сегментаў вала (адзінка: мм).
2. Змена зыходнага становішча кожнага інструмента паасобку
Прынцып наладжвання інструментаў гэтага метаду заключаецца ў тым, што кожны інструмент наладжвае сваю пачатковую праграмную кропку, такім чынам, ускосна выраўноўваючы аднолькавую зыходную пазіцыю.
Этапы наладжвання інструмента паказаны на малюнку 3.
Пасля грубай каліброўкі інструмента нумар. Пасля грубай каліброўкі інструмента і запісу зрушэнняў эталонны інструмент № 2 павінен знаходзіцца ў пачатку праграмы.
Этапы з 2) па (5) першага дакладнага метаду наладкі інструмента ідэнтычныя.
Выкарыстоўвайце праграму O1000 для выканання пробнага рэзу.Вымерайце даўжыню Li і дыяметр PhDi кожнай секцыі.
Інструмент крокавага перамяшчэння або трымальнік інструмента MDI кампенсуе памылкі і карэктуе пачатковую кропку праграмы кожнага інструмента.
Паўтарайце крокі (6), пакуль зыходная пазіцыя для кожнага нестандартнага праграмнага інструмента не будзе ў межах дазволенага дыяпазону дакладнасці.
Доступ да табліцы зрушэння інструмента можна атрымаць, увёўшы адносныя каардынаты, паказаныя на ЭПТ, у слупкі зрушэння па X і зрушэння па Z, якія адпавядаюць нумару зрушэння інструмента.Гэты спосаб зручны і просты.Гэты спосаб просты і зручны.
3. Змяніце ўсе метады зрушэння для нестандартных інструментаў адначасова пасля змены пачатковай пазіцыі эталоннай праграмы інструмента.
Метад такі ж, як і ў першага дакладнага метаду наладкі інструмента.Адзінае адрозненне паміж імі заключаецца ў тым, што на этапе 7 выклікаецца праграма O1003, якая адначасова выклікае тры нажы (O1004 выдаляе No. Праграма O1003 замяняе раздзел No. 2 апрацоўкі інструмента. Астатнія этапы ідэнтычныя.
6. Гэтым метадам можна аднавіць адразу чатыры нажа
Каб высветліць памылку апрацоўкі, вымерайце дыяметр кожнай секцыі, PhDi, і даўжыню кожнай секцыі, Li (i=2, 1, 4), выкарыстоўваючы метад адноснага зрушэння інструмента.Выкарыстоўвайце MDI або паэтапнае перамяшчэнне да трымальніка для эталоннага інструмента.Змяніць пачатковую кропку праграмы.Для нестандартных інструментаў спачатку выпраўце зрушэнне, выкарыстоўваючы зыходнае зрушэнне.Затым увядзіце новае зрушэнне.Памылка апрацоўкі эталоннага інструмента таксама павінна быць уведзена ў слупок зносу.Выклічце праграму пробнай рэзкі O1005, калі для каліброўкі інструмента выкарыстоўваецца абсалютнае зрушэнне інструмента.Затым кампенсуйце памылкі апрацоўкі інструментаў у слупках зносу іх адпаведных нумароў зрушэння інструмента.
Які ўплыў аказвае выбар правільнага метаду наладкі інструмента для такарных станкоў з ЧПУ на якасцьАпрацоўка дэталяў з ЧПУ?
Дакладнасць і дакладнасць:
Рэжучыя інструменты будуць правільна выраўнаваны, калі інструмент настроены правільна.Гэта непасрэдна ўплывае на дакладнасць і дакладнасць апрацоўкі.Няправільная налада інструмента можа прывесці да памылак у памерах, дрэннай аздаблення паверхняў і нават лому.
Кансістэнцыя:
Паслядоўныя налады інструмента забяспечваюць аднастайнасць аперацый апрацоўкі і нязменную якасць некалькіх дэталяў.Гэта памяншае варыяцыі аздаблення паверхні і памераў і дапамагае падтрымліваць жорсткія допускі.
Тэрмін службы інструмента і адзенне інструмента:
Забяспечваючы належнае зачапленне інструмента з нарыхтоўкай, правільная налада інструмента можа павялічыць тэрмін службы інструмента.Няправільная налада інструмента можа прывесці да празмернага зносу і паломкі інструмента, што прывядзе да скарачэння тэрміну службы інструмента.
Прадукцыйнасць і эфектыўнасць
Эфектыўныя метады наладкі інструмента могуць скараціць час наладкі машыны і павялічыць час бесперабойнай працы.Гэта павялічвае прадукцыйнасць за кошт мінімізацыі часу прастою і максімальнага павелічэння часу рэзкі.Гэта дазваляе хутчэй мяняць інструменты і скарачае агульны час апрацоўкі.
Бяспека аператара
На бяспеку аператара можна паўплываць, выбраўшы правільны метад налады інструмента.Некаторыя метады, такія як распазнаванне выявы або вымярэнне лазерным інструментам, пазбаўляюць ад неабходнасці звяртацца з інструментамі ўручную, зніжаючы верагоднасць траўмаў.
Мэта Anebon - зразумець выдатныя дэфігурацыі ў выніку вытворчасці і ад усёй душы забяспечыць найлепшую падтрымку айчынным і замежным кліентам да 2022 года. Высакаякасная нержавеючая сталь, алюміній, высокая дакладнасць, зробленая на заказТакарныя станкі з ЧПУ, фрэзераванне,запасныя часткі з ЧПУдля аэракасмічнай прамысловасці, каб пашырыць наш міжнародны рынак, Anebon у асноўным пастаўляе нашым замежным кліентам механічныя дэталі высокай якасці, фрэзераваныя дэталі і такарныя паслугі з ЧПУ.
Кампанія Anebon падтрымлівае дух «інавацый, гармоніі, каманднай працы і сумеснага выкарыстання, шляхоў, прагматычнага прагрэсу».Дайце нам шанец, і мы дакажам сваю здольнасць.З вашай ласкавай дапамогай, Anebon верыць, што мы можам стварыць з вамі светлую будучыню разам.
Час публікацыі: 19 кастрычніка 2023 г