
सीएनसी मशीन टूल उपकरण की दक्षता इसकी सटीकता से निकटता से जुड़ी हुई है, जिससे ऐसे उपकरणों की खरीद या विकास करते समय यह कंपनियों के लिए एक प्रमुख प्राथमिकता बन जाती है।हालाँकि, अधिकांश नए मशीन टूल्स की सटीकता अक्सर फैक्ट्री छोड़ने पर आवश्यक मानकों से कम हो जाती है।इसके अतिरिक्त, लंबे समय तक उपयोग के दौरान यांत्रिक रनिंग-इन और घिसाव की घटना इष्टतम उत्पादन प्रदर्शन सुनिश्चित करने के लिए सीएनसी मशीन टूल्स की सटीकता को समायोजित करने की महत्वपूर्ण आवश्यकता पर जोर देती है।
1. प्रतिक्रिया मुआवजा
सीएनसी मशीन टूल्स के भीतर बैकलैश को कम करना, प्रत्येक समन्वय अक्ष की फ़ीड ट्रांसमिशन श्रृंखला पर ड्राइविंग घटकों के रिवर्स डेड जोन से उत्पन्न होने वाली त्रुटियां और प्रत्येक यांत्रिक गति ट्रांसमिशन जोड़ी की रिवर्स क्लीयरेंस विचलन का कारण बनती है क्योंकि प्रत्येक समन्वय अक्ष आगे से रिवर्स गति में संक्रमण करता है।यह विचलन, जिसे रिवर्स क्लीयरेंस या खोई हुई गति के रूप में भी जाना जाता है, सेमी-क्लोज्ड-लूप सर्वो सिस्टम का उपयोग करने पर मशीन टूल की स्थिति सटीकता और दोहराव स्थिति सटीकता को महत्वपूर्ण रूप से प्रभावित कर सकता है।इसके अलावा, समय के साथ घिसाव के कारण गतिक युग्म क्लीयरेंस में क्रमिक वृद्धि से रिवर्स विचलन में इसी वृद्धि होती है।इसलिए, मशीन उपकरण के प्रत्येक समन्वय अक्ष के विपरीत विचलन के लिए नियमित माप और मुआवजा अनिवार्य है।

बैकलैश को मापना
विपरीत विचलन का आकलन करने के लिए, समन्वय अक्ष की यात्रा सीमा के भीतर प्रारंभ करें।सबसे पहले, एक निर्धारित दूरी को आगे या विपरीत दिशा में ले जाकर एक संदर्भ बिंदु स्थापित करें।इसके बाद, एक निश्चित दूरी तय करने के लिए उसी दिशा में एक विशिष्ट मूवमेंट कमांड जारी करें।इसके बाद, विपरीत दिशा में समान दूरी तय करने के लिए आगे बढ़ें और संदर्भ और स्टॉप स्थिति के बीच अंतर निर्धारित करें।आमतौर पर, कई माप (अक्सर सात) मध्यबिंदु के पास तीन स्थानों और यात्रा सीमा के दोनों चरम पर आयोजित किए जाते हैं।फिर प्रत्येक स्थान पर औसत मूल्य की गणना की जाती है, इन औसतों में से अधिकतम का उपयोग रिवर्स विचलन के माप के रूप में किया जाता है।विपरीत विचलन मान को सटीक रूप से निर्धारित करने के लिए माप के दौरान एक विशिष्ट दूरी तय करना आवश्यक है।

रैखिक गति अक्ष के विपरीत विचलन का आकलन करते समय, माप उपकरण के रूप में डायल संकेतक या डायल गेज का उपयोग करना आम है।यदि परिस्थितियाँ अनुमति देती हैं, तो इस उद्देश्य के लिए दोहरी-आवृत्ति लेजर इंटरफेरोमीटर का भी उपयोग किया जा सकता है।माप के लिए डायल इंडिकेटर का उपयोग करते समय, यह सुनिश्चित करना आवश्यक है कि मीटर का आधार और स्टेम अत्यधिक विस्तारित न हो, क्योंकि माप के दौरान एक लंबा कैंटिलीवर बल के कारण मीटर के आधार को हिला सकता है, जिससे गलत रीडिंग और अवास्तविक मुआवजा मान हो सकते हैं।
माप के लिए प्रोग्रामिंग पद्धति को लागू करने से प्रक्रिया की सुविधा और सटीकता बढ़ सकती है।उदाहरण के लिए, तीन-समन्वय ऊर्ध्वाधर मशीन टूल पर एक्स-अक्ष के रिवर्स विचलन का आकलन करने के लिए, प्रक्रिया को स्पिंडल की बेलनाकार सतह के खिलाफ मीटर दबाकर शुरू किया जा सकता है, इसके बाद माप के लिए एक निर्दिष्ट कार्यक्रम चलाया जा सकता है।
N10G91G01X50F1000;कार्यक्षेत्र को दाईं ओर ले जाएँ
N20X-50;ट्रांसमिशन गैप को खत्म करने के लिए वर्कटेबल बाईं ओर चला जाता है
N30G04X5;अवलोकन के लिए रुकें
N40Z50;Z-अक्ष उठा हुआ और रास्ते से हट गया
N50X-50: कार्यक्षेत्र बाईं ओर चलता है
N60X50: कार्यक्षेत्र दाईं ओर चलता है और रीसेट हो जाता है
N70Z-50: Z अक्ष रीसेट
N80G04X5: अवलोकन के लिए रुकें
N90M99;
यह ध्यान रखना महत्वपूर्ण है कि मापे गए परिणाम कार्यक्षेत्र की विभिन्न परिचालन गति के आधार पर भिन्न हो सकते हैं।आम तौर पर, कम गति पर मापा गया मान उच्च गति से अधिक होता है, खासकर जब मशीन उपकरण अक्ष भार और गति प्रतिरोध पर्याप्त होता है।कम गति पर, कार्य तालिका धीमी गति से चलती है, जिसके परिणामस्वरूप ओवरशूट और ओवरट्रैवल की संभावना कम होती है, इसलिए उच्च मापा मूल्य प्राप्त होता है।दूसरी ओर, उच्च गति पर, तेज़ वर्कटेबल गति के कारण ओवरशूट और ओवरट्रैवल होने की अधिक संभावना होती है, जिसके परिणामस्वरूप कम मापा गया मान प्राप्त होता है।रोटरी गति अक्ष के व्युत्क्रम विचलन के लिए माप दृष्टिकोण रैखिक अक्ष के समान प्रक्रिया का पालन करता है, जिसमें एकमात्र अंतर पता लगाने के लिए उपयोग किए जाने वाले उपकरण का है।

प्रतिक्रिया के लिए क्षतिपूर्ति
देश में बने कई सीएनसी मशीन टूल्स 0.02 मिमी से अधिक की स्थिति सटीकता प्रदर्शित करते हैं, फिर भी क्षतिपूर्ति की क्षमता का अभाव है।कुछ स्थितियों में, वन-वे पोजीशनिंग को पूरा करने और ऐसे मशीन टूल्स के लिए बैकलैश को खत्म करने के लिए प्रोग्रामिंग तकनीकों को नियोजित किया जा सकता है।जब तक यांत्रिक घटक अपरिवर्तित रहता है, कम गति, एक-तरफ़ा स्थिति इंटरपोलेशन के शुरुआती बिंदु तक पहुंचने के बाद इंटरपोलेशन प्रसंस्करण शुरू करना संभव है।इंटरपोलेशन फ़ीड के दौरान विपरीत दिशा का सामना करते समय, औपचारिक रूप से रिवर्स क्लीयरेंस मान को इंटरपोल करने से इंटरपोलेशन प्रसंस्करण की सटीकता को बढ़ाने और प्रभावी ढंग से पूरा करने की क्षमता होती है।सीएनसी मिल्ड भागसहिष्णुता की आवश्यकताएँ।
सीएनसी मशीन टूल्स की अन्य किस्मों के लिए, सीएनसी डिवाइस में कई मेमोरी पते आमतौर पर प्रत्येक अक्ष के बैकलैश मान को संग्रहीत करने के लिए निर्दिष्ट किए जाते हैं।जब मशीन टूल की एक धुरी को अपनी गति की दिशा बदलने के लिए निर्देशित किया जाता है, तो सीएनसी डिवाइस स्वचालित रूप से धुरी के बैकलैश मान को पुनः प्राप्त कर लेगा, जो समन्वय विस्थापन कमांड मान की भरपाई और सुधार करता है।यह सुनिश्चित करता है कि मशीन टूल को कमांड स्थिति में सटीक रूप से रखा जा सकता है और मशीन टूल की सटीकता पर रिवर्स विचलन के प्रतिकूल प्रभाव को कम किया जा सकता है।
आमतौर पर, सीएनसी सिस्टम एकल उपलब्ध बैकलैश क्षतिपूर्ति मूल्य से सुसज्जित होते हैं।उच्च और निम्न गति गति परिशुद्धता को संतुलित करना, साथ ही यांत्रिक सुधार को संबोधित करना चुनौतीपूर्ण हो जाता है।इसके अलावा, तीव्र गति के दौरान मापा गया रिवर्स विचलन मान केवल इनपुट क्षतिपूर्ति मूल्य के रूप में उपयोग किया जा सकता है।नतीजतन, काटने के दौरान तीव्र स्थिति सटीकता और इंटरपोलेशन सटीकता के बीच संतुलन हासिल करना मुश्किल साबित होता है।

FANUC0i और FANUC18i जैसे सीएनसी सिस्टम के लिए, तीव्र गति (G00) और धीमी गति से काटने वाली फ़ीड गति (G01) के लिए बैकलैश मुआवजे के दो उपलब्ध रूप हैं।चुनी गई फीडिंग विधि के आधार पर, सीएनसी प्रणाली उन्नत प्रसंस्करण परिशुद्धता प्राप्त करने के लिए स्वचालित रूप से अलग-अलग क्षतिपूर्ति मूल्यों का चयन और उपयोग करती है।
G01 कटिंग फ़ीड गति से प्राप्त बैकलैश मान A को पैरामीटर NO11851 में दर्ज किया जाना चाहिए (G01 परीक्षण गति आमतौर पर उपयोग की जाने वाली कटिंग फ़ीड गति और मशीन टूल विशेषताओं के आधार पर निर्धारित की जानी चाहिए), जबकि G00 से बैकलैश मान B इनपुट किया जाना चाहिए पैरामीटर NO11852 में।यह ध्यान रखना महत्वपूर्ण है कि यदि सीएनसी प्रणाली अलग से निर्दिष्ट रिवर्स बैकलैश मुआवजे को निष्पादित करना चाहती है, तो पैरामीटर संख्या 1800 का चौथा अंक (आरबीके) 1 पर सेट किया जाना चाहिए;अन्यथा, अलग से निर्दिष्ट रिवर्स बैकलैश मुआवजा नहीं दिया जाएगा।अंतर मुआवजा.G02, G03, JOG, और G01 सभी समान मुआवजा मूल्य नियोजित करते हैं।

पिच त्रुटियों के लिए मुआवजा
सीएनसी मशीन टूल्स की सटीक स्थिति में उस सटीकता का मूल्यांकन शामिल होता है जिसके साथ मशीन टूल के चल घटक सीएनसी सिस्टम के कमांड के तहत पहुंच सकते हैं।यह परिशुद्धता सीएनसी मशीन टूल्स को पारंपरिक मशीन टूल्स से अलग करने में महत्वपूर्ण भूमिका निभाती है।मशीन टूल की ज्यामितीय परिशुद्धता के साथ संरेखित, यह विशेष रूप से छेद मशीनिंग में काटने की परिशुद्धता को महत्वपूर्ण रूप से प्रभावित करता है।छेद ड्रिलिंग में पिच त्रुटि का काफी प्रभाव पड़ता है।एक सीएनसी मशीन टूल की प्रसंस्करण परिशुद्धता का आकलन करने की क्षमता प्राप्त स्थिति सटीकता पर निर्भर करती है।इसलिए, प्रसंस्करण गुणवत्ता सुनिश्चित करने के लिए सीएनसी मशीन टूल्स की स्थिति सटीकता का पता लगाना और सुधार करना आवश्यक उपाय हैं।
पिच मापन प्रक्रिया
वर्तमान में, मशीन टूल्स के मूल्यांकन और प्रबंधन के लिए प्राथमिक विधि दोहरी-आवृत्ति लेजर इंटरफेरोमीटर का उपयोग है।ये इंटरफेरोमीटर लेजर इंटरफेरोमेट्री के सिद्धांतों पर काम करते हैं और माप के संदर्भ के रूप में वास्तविक समय लेजर तरंग दैर्ध्य का उपयोग करते हैं, जिससे माप सटीकता बढ़ती है और अनुप्रयोगों की सीमा का विस्तार होता है।
पिच का पता लगाने की प्रक्रिया इस प्रकार है:
- दोहरी-आवृत्ति लेजर इंटरफेरोमीटर स्थापित करें।
- मशीन टूल की धुरी के साथ एक ऑप्टिकल माप उपकरण रखें जिसके लिए माप की आवश्यकता होती है।
- यह सुनिश्चित करने के लिए लेजर हेड को संरेखित करें कि माप अक्ष या तो मशीन उपकरण के आंदोलन अक्ष के साथ समानांतर या समरेख है, इस प्रकार ऑप्टिकल पथ पूर्व-संरेखित होता है।
- एक बार लेजर अपने ऑपरेटिंग तापमान पर पहुंच जाए तो माप पैरामीटर इनपुट करें।
- मशीन टूल को घुमाकर निर्धारित माप प्रक्रियाओं को निष्पादित करें।
- डेटा को संसाधित करें और परिणाम उत्पन्न करें।
पिच त्रुटि मुआवजा और स्वचालित अंशांकन
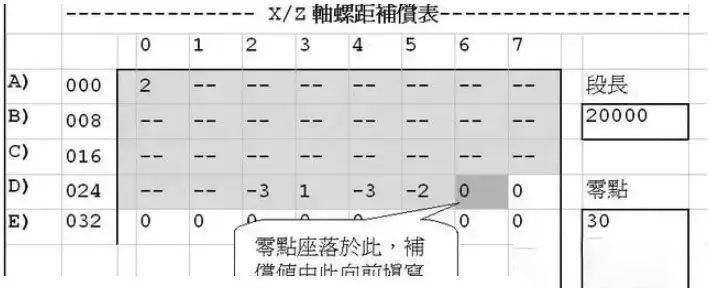
जब सीएनसी मशीन टूल की मापी गई स्थिति त्रुटि स्वीकार्य सीमा से अधिक हो जाती है, तो त्रुटि को ठीक करने की आवश्यकता होती है।एक प्रचलित दृष्टिकोण में पिच त्रुटि क्षतिपूर्ति तालिका की गणना करना और पोजिशनिंग त्रुटि को सुधारने के लिए इसे मशीन टूल के सीएनसी सिस्टम में मैन्युअल रूप से इनपुट करना शामिल है।हालाँकि, मैन्युअल मुआवजे में समय लग सकता है और त्रुटियों की संभावना हो सकती है, खासकर जब सीएनसी मशीन टूल के तीन या चार अक्षों में कई मुआवजे बिंदुओं से निपटना हो।
इस प्रक्रिया को सुव्यवस्थित करने के लिए एक समाधान विकसित किया गया है।आरएस232 इंटरफ़ेस के माध्यम से कंप्यूटर और मशीन टूल के सीएनसी नियंत्रक को जोड़कर और वीबी में बनाए गए स्वचालित अंशांकन सॉफ़्टवेयर का लाभ उठाकर, लेजर इंटरफेरोमीटर और सीएनसी मशीन टूल को सिंक्रनाइज़ करना संभव है।यह सिंक्रनाइज़ेशन सीएनसी मशीन टूल की स्थिति सटीकता का स्वचालित पता लगाने और स्वचालित पिच त्रुटि क्षतिपूर्ति के कार्यान्वयन को सक्षम बनाता है।मुआवज़ा विधि में शामिल हैं:
- सीएनसी नियंत्रण प्रणाली में मौजूदा मुआवजा मापदंडों का बैकअप बनाना।
- कंप्यूटर का उपयोग करके बिंदु-दर-बिंदु स्थिति सटीकता माप के लिए एक मशीन टूल सीएनसी प्रोग्राम तैयार करना, जिसे बाद में सीएनसी सिस्टम में प्रेषित किया जाता है।
- प्रत्येक बिंदु की स्थिति त्रुटि को स्वचालित रूप से मापना।
- पूर्व निर्धारित मुआवज़ा बिंदुओं के आधार पर मुआवज़ा मापदंडों का एक नया सेट तैयार करना और उन्हें स्वचालित पिच मुआवज़े के लिए सीएनसी प्रणाली में प्रेषित करना।
- सटीकता को बार-बार सत्यापित करना।
इन विशिष्ट समाधानों का उद्देश्य सीएनसी मशीन टूल्स की सटीकता को बढ़ाना है।फिर भी, यह ध्यान रखना आवश्यक है कि विभिन्न सीएनसी मशीन टूल्स की सटीकता भिन्न हो सकती है।परिणामस्वरूप, मशीन टूल्स को उनकी व्यक्तिगत परिस्थितियों के अनुसार कैलिब्रेट किया जाना चाहिए।
यदि मशीन टूल पर त्रुटि क्षतिपूर्ति नहीं की जाती है, तो उत्पादित सीएनसी भागों पर इसका क्या प्रभाव पड़ेगा?
यदि मशीन टूल पर त्रुटि क्षतिपूर्ति को नजरअंदाज कर दिया जाता है, तो इसके परिणामस्वरूप विसंगतियां हो सकती हैंसीएनसी भागनिर्मित.उदाहरण के लिए, यदि मशीन टूल में एक असमायोजित स्थिति त्रुटि है, तो उपकरण या वर्कपीस की वास्तविक स्थिति सीएनसी प्रोग्राम में निर्दिष्ट प्रोग्राम की गई स्थिति से भिन्न हो सकती है, जिससे उत्पादित भागों में आयामी अशुद्धियाँ और ज्यामितीय त्रुटियाँ हो सकती हैं।
उदाहरण के लिए, यदि सीएनसी मिलिंग मशीन में एक्स-अक्ष में एक असमायोजित स्थिति त्रुटि है, तो वर्कपीस में मिल्ड स्लॉट या छेद गलत तरीके से संरेखित हो सकते हैं या गलत आयाम हो सकते हैं।इसी तरह, एक खराद ऑपरेशन में, असमायोजित स्थिति त्रुटियों के कारण मुड़े हुए हिस्सों के व्यास या लंबाई में अशुद्धियाँ हो सकती हैं।इन विसंगतियों के कारण गैर-अनुरूपता वाले हिस्से विफल हो सकते हैं
एनीबॉन उत्कृष्ट और उत्कृष्ट बनने के लिए प्रत्येक कड़ी मेहनत करेगा, और ओईएम, कस्टम के लिए चीन गोल्ड सप्लायर के लिए अंतरमहाद्वीपीय शीर्ष-ग्रेड और उच्च-तकनीकी उद्यमों के रैंक से खड़े होने के लिए हमारे उपायों में तेजी लाएगा।सीएनसी मशीनिंग सेवा, शीट मेटल निर्माण सेवा, मिलिंग सेवाएँ।आपकी संतुष्टि को पूरा करने के लिए एनीबॉन आपकी वैयक्तिकृत खरीदारी करेगा!एनीबोन का व्यवसाय कई विभाग स्थापित करता है, जिनमें आउटपुट विभाग, राजस्व विभाग, उत्कृष्ट नियंत्रण विभाग और सेवा केंद्र आदि शामिल हैं।
फ़ैक्टरी आपूर्ति चीनपरिशुद्धता भाग और एल्यूमीनियम भाग, आप बाजार में बहुत सारे समान भागों को रोकने के लिए अपने स्वयं के मॉडल के लिए अद्वितीय डिजाइन विकसित करने के अपने विचार से एनेबॉन को अवगत करा सकते हैं!हम आपकी सभी आवश्यकताओं को पूरा करने के लिए अपनी सर्वोत्तम सेवा देने जा रहे हैं!एनीबोन से तुरंत संपर्क करना याद रखें!
पोस्ट समय: जनवरी-09-2024