
ປະສິດທິພາບຂອງອຸປະກອນເຄື່ອງມືເຄື່ອງຈັກ CNC ແມ່ນຕິດພັນກັບຄວາມຖືກຕ້ອງຂອງມັນ, ເຮັດໃຫ້ມັນເປັນບູລິມະສິດທີ່ສໍາຄັນສໍາລັບບໍລິສັດໃນເວລາທີ່ຈັດຊື້ຫຼືພັດທະນາເຄື່ອງມືດັ່ງກ່າວ.ຢ່າງໃດກໍ່ຕາມ, ຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງຈັກໃຫມ່ສ່ວນໃຫຍ່ມັກຈະຂາດມາດຕະຖານທີ່ກໍານົດໄວ້ເມື່ອອອກຈາກໂຮງງານ.ນອກຈາກນັ້ນ, ການປະກົດຕົວຂອງເຄື່ອງຈັກໃນການເຮັດວຽກແລະການສວມໃສ່ໃນລະຫວ່າງການໃຊ້ເວລາດົນນານເນັ້ນຫນັກເຖິງຄວາມຕ້ອງການທີ່ສໍາຄັນສໍາລັບການປັບຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງຈັກ CNC ເພື່ອຮັບປະກັນການປະຕິບັດການຜະລິດທີ່ດີທີ່ສຸດ.
1. ການຊົດເຊີຍ backlash
ການຫຼຸດຜ່ອນ Backlash ພາຍໃນເຄື່ອງມືເຄື່ອງຈັກ CNC, ຄວາມຜິດພາດທີ່ເກີດຈາກເຂດຕາຍປີ້ນກັບກັນຂອງອົງປະກອບຂັບລົດຢູ່ໃນລະບົບຕ່ອງໂສ້ສາຍສົ່ງອາຫານຂອງແຕ່ລະແກນປະສານງານແລະການເກັບກູ້ປີ້ນກັບກັນຂອງແຕ່ລະຄູ່ສາຍສົ່ງຂອງກົນຈັກເຮັດໃຫ້ deviations ຍ້ອນວ່າແຕ່ລະແກນປະສານງານປ່ຽນຈາກຫນ້າໄປຫາການເຄື່ອນໄຫວປີ້ນກັບກັນ.ການບ່ຽງເບນນີ້, ເຊິ່ງເອີ້ນກັນວ່າການເກັບກູ້ແບບປີ້ນກັບກັນຫຼືການສູນເສຍເວລາ, ສາມາດສົ່ງຜົນກະທົບຕໍ່ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງແລະຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງທີ່ຊ້ໍາກັນຂອງເຄື່ອງມືເຄື່ອງຈັກໃນເວລາທີ່ລະບົບ servo ເຄິ່ງປິດປິດ.ຍິ່ງໄປກວ່ານັ້ນ, ການເພີ່ມຂຶ້ນເທື່ອລະກ້າວໃນການເກັບກູ້ຄູ່ kinematic ເນື່ອງຈາກການສວມໃສ່ໃນໄລຍະເວລາເຮັດໃຫ້ການເພີ່ມຂຶ້ນທີ່ສອດຄ້ອງກັນໃນການ deviation ປີ້ນກັບກັນ.ດັ່ງນັ້ນ, ການວັດແທກປົກກະຕິແລະການຊົດເຊີຍສໍາລັບການ deviation ປີ້ນກັບກັນຂອງແຕ່ລະແກນປະສານງານຂອງເຄື່ອງມືເຄື່ອງຈັກແມ່ນມີຄວາມຈໍາເປັນ.

ການວັດແທກ Backlash
ເພື່ອປະເມີນຄວາມບ່ຽງເບນປີ້ນກັບກັນ, ເລີ່ມຕົ້ນພາຍໃນຂອບເຂດການເດີນທາງຂອງແກນປະສານງານ.ກ່ອນອື່ນ ໝົດ, ສ້າງຕັ້ງຈຸດອ້າງອີງໂດຍການເຄື່ອນຍ້າຍໄລຍະຫ່າງທີ່ ກຳ ນົດໄວ້ໃນທິດທາງຂ້າງ ໜ້າ ຫຼືປີ້ນກັບກັນ.ປະຕິບັດຕາມນີ້, ອອກຄໍາສັ່ງການເຄື່ອນໄຫວສະເພາະໃນທິດທາງດຽວກັນເພື່ອໃຫ້ກວມເອົາໄລຍະທີ່ແນ່ນອນ.ຕໍ່ໄປ, ດໍາເນີນການຍ້າຍໄລຍະທາງດຽວກັນໃນທິດທາງກົງກັນຂ້າມແລະກໍານົດຄວາມແຕກຕ່າງລະຫວ່າງຕໍາແຫນ່ງອ້າງອີງແລະຢຸດ.ໂດຍປົກກະຕິ, ການວັດແທກຫຼາຍ (ມັກຈະມີເຈັດ) ແມ່ນດໍາເນີນຢູ່ໃນສາມສະຖານທີ່ຢູ່ໃກ້ກັບຈຸດກາງແລະທັງສອງຈຸດສູງສຸດຂອງໄລຍະການເດີນທາງ.ຫຼັງຈາກນັ້ນ, ຄ່າສະເລ່ຍແມ່ນຖືກຄິດໄລ່ໃນແຕ່ລະສະຖານທີ່, ສູງສຸດໃນບັນດາຄ່າສະເລ່ຍເຫຼົ່ານີ້ຖືກນໍາໃຊ້ເປັນການວັດແທກສໍາລັບ deviation ປີ້ນກັບກັນ.ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຍ້າຍໄລຍະທາງສະເພາະໃນລະຫວ່າງການວັດແທກເພື່ອກໍານົດຄ່າ deviation ປີ້ນກັບກັນຢ່າງຖືກຕ້ອງ.

ເມື່ອປະເມີນຄວາມບ່ຽງເບນດ້ານຫຼັງຂອງແກນການເຄື່ອນໄຫວເສັ້ນຊື່, ມັນເປັນເລື່ອງທຳມະດາທີ່ຈະໃຊ້ຕົວຊີ້ບອກປັດ ຫຼືເຄື່ອງວັດແທກໜ້າປັດເປັນເຄື່ອງມືວັດແທກ.ຖ້າສະຖານະການອະນຸຍາດ, ເຄື່ອງວັດແທກເລເຊີສອງຄວາມຖີ່ສາມາດຖືກ ນຳ ໃຊ້ເພື່ອຈຸດປະສົງນີ້.ໃນເວລາທີ່ນໍາໃຊ້ຕົວຊີ້ວັດ dial ສໍາລັບການວັດແທກ, ມັນເປັນສິ່ງຈໍາເປັນເພື່ອຮັບປະກັນວ່າຖານແມັດແລະລໍາບໍ່ຂະຫຍາຍອອກຫຼາຍເກີນໄປ, ຍ້ອນວ່າ cantilever ຍາວໃນລະຫວ່າງການວັດແທກສາມາດເຮັດໃຫ້ຖານແມັດຍ້າຍອອກຍ້ອນຜົນບັງຄັບໃຊ້, ເຮັດໃຫ້ການອ່ານບໍ່ຖືກຕ້ອງແລະຄ່າຊົດເຊີຍທີ່ບໍ່ສົມຈິງ.
ການປະຕິບັດວິທີການດໍາເນີນໂຄງການສໍາລັບການວັດແທກສາມາດເພີ່ມຄວາມສະດວກແລະຄວາມຖືກຕ້ອງຂອງຂະບວນການ.ສໍາລັບຕົວຢ່າງ, ເພື່ອປະເມີນການ deviation ປີ້ນຂອງແກນ X ໃນເຄື່ອງມືເຄື່ອງຕັ້ງສາມປະສານງານ, ຂະບວນການສາມາດເລີ່ມຕົ້ນໂດຍການກົດແມັດຕໍ່ກັບຫນ້າທໍ່ກົມຂອງ spindle, ປະຕິບັດຕາມໂດຍການດໍາເນີນໂຄງການທີ່ກໍານົດໄວ້ສໍາລັບການວັດແທກ.
N10G91G01X50F1000;ຍ້າຍບ່ອນເຮັດວຽກໄປທາງຂວາ
N20X-50;ຕາຕະລາງເຮັດວຽກຍ້າຍໄປທາງຊ້າຍເພື່ອລົບລ້າງຊ່ອງຫວ່າງການສົ່ງຕໍ່
N30G04X5;ຢຸດຊົ່ວຄາວເພື່ອສັງເກດ
N40Z50;ແກນ Z ຍົກຂຶ້ນແລະອອກຈາກທາງ
N50X-50: Workbench ຍ້າຍໄປທາງຊ້າຍ
N60X50: Workbench ຍ້າຍຂວາແລະຕັ້ງໃຫມ່
N70Z-50: ຣີເຊັດແກນ Z
N80G04X5: ຢຸດຊົ່ວຄາວເພື່ອສັງເກດ
N90M99;
ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະສັງເກດວ່າຜົນໄດ້ຮັບທີ່ວັດແທກອາດຈະແຕກຕ່າງກັນໂດຍອີງໃສ່ຄວາມໄວການເຮັດວຽກທີ່ແຕກຕ່າງກັນຂອງ workbench.ໂດຍທົ່ວໄປແລ້ວ, ມູນຄ່າທີ່ວັດແທກໄດ້ຢູ່ທີ່ຄວາມໄວຕ່ໍາແມ່ນຫຼາຍກ່ວາທີ່ມີຄວາມໄວສູງ, ໂດຍສະເພາະໃນເວລາທີ່ການໂຫຼດແກນເຄື່ອງມືເຄື່ອງຈັກແລະການຕໍ່ຕ້ານການເຄື່ອນໄຫວຢ່າງຫຼວງຫຼາຍ.ຢູ່ທີ່ຄວາມໄວຕ່ໍາ, ຕາຕະລາງເຮັດວຽກເຄື່ອນທີ່ຊ້າລົງ, ເຮັດໃຫ້ມີຄວາມເປັນໄປໄດ້ຫນ້ອຍທີ່ຈະ overshoot ແລະ overtravel, ດັ່ງນັ້ນຜົນໄດ້ຮັບການວັດແທກສູງກວ່າ.ໃນທາງກົງກັນຂ້າມ, ຢູ່ທີ່ຄວາມໄວທີ່ສູງຂຶ້ນ, overshoot ແລະ overtravel ມັກຈະເກີດຂຶ້ນຍ້ອນຄວາມໄວຂອງຕາຕະລາງເຮັດວຽກທີ່ໄວຂຶ້ນ, ເຮັດໃຫ້ມູນຄ່າການວັດແທກນ້ອຍລົງ.ວິທີການວັດແທກສໍາລັບການ deviation ປີ້ນກັບກັນຂອງແກນ rotary motion ປະຕິບັດຕາມຂະບວນການທີ່ຄ້າຍຄືກັນກັບຂອງ linear axis, ມີຄວາມແຕກຕ່າງພຽງແຕ່ເປັນເຄື່ອງມືທີ່ໃຊ້ສໍາລັບການຊອກຄົ້ນຫາ.

ການຊົດເຊີຍສໍາລັບ Backlash
ເຄື່ອງມືເຄື່ອງ CNC ຈໍານວນຫລາຍທີ່ຜະລິດໃນປະເທດສະແດງໃຫ້ເຫັນຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງຫຼາຍກວ່າ 0.02 ມມ, ແຕ່ຍັງຂາດຄວາມສາມາດໃນການຊົດເຊີຍ.ໃນບາງສະຖານະການ, ເຕັກນິກການຂຽນໂປລແກລມສາມາດຖືກນໍາໃຊ້ເພື່ອເຮັດສໍາເລັດການຈັດຕໍາແຫນ່ງທາງດຽວແລະລົບລ້າງ backlash ສໍາລັບເຄື່ອງມືເຄື່ອງຈັກດັ່ງກ່າວ.ຕາບໃດທີ່ອົງປະກອບກົນຈັກຍັງຄົງບໍ່ປ່ຽນແປງ, ການລິເລີ່ມການປຸງແຕ່ງ interpolation ແມ່ນເປັນໄປໄດ້ເມື່ອຄວາມໄວຕ່ໍາ, ຕໍາແຫນ່ງທາງດຽວເຖິງຈຸດເລີ່ມຕົ້ນສໍາລັບການ interpolation.ເມື່ອພົບກັບທິດທາງປີ້ນກັບກັນໃນລະຫວ່າງອາຫານ interpolation, interpolating ຢ່າງເປັນທາງການມູນຄ່າການເກັບກູ້ reverse ມີທ່າແຮງທີ່ຈະເສີມຂະຫຍາຍຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງ interpolation ແລະຕອບສະຫນອງປະສິດທິຜົນ.cnc milled ສ່ວນຄວາມຕ້ອງການຄວາມທົນທານຂອງ.
ສໍາລັບແນວພັນອື່ນໆຂອງເຄື່ອງມືເຄື່ອງ CNC, ທີ່ຢູ່ຫນ່ວຍຄວາມຈໍາຫຼາຍໃນອຸປະກອນ CNC ແມ່ນຖືກກໍານົດໂດຍປົກກະຕິເພື່ອເກັບຮັກສາມູນຄ່າ backlash ຂອງແຕ່ລະແກນ.ເມື່ອແກນຂອງເຄື່ອງມືເຄື່ອງຈັກຖືກນໍາໄປປ່ຽນທິດທາງການເຄື່ອນໄຫວຂອງມັນ, ອຸປະກອນ CNC ອັດຕະໂນມັດຈະດຶງມູນຄ່າ backlash ຂອງແກນ, ເຊິ່ງຊົດເຊີຍແລະແກ້ໄຂຄ່າຄໍາສັ່ງການເຄື່ອນຍ້າຍປະສານງານ.ນີ້ຮັບປະກັນວ່າເຄື່ອງມືເຄື່ອງຈັກສາມາດຖືກຈັດໃສ່ໃນຕໍາແຫນ່ງຄໍາສັ່ງທີ່ຊັດເຈນແລະຫຼຸດຜ່ອນຜົນກະທົບທາງລົບຂອງ deviation ປີ້ນກັບຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງຈັກ.
ໂດຍປົກກະຕິ, ລະບົບ CNC ແມ່ນອຸປະກອນທີ່ມີມູນຄ່າການຊົດເຊີຍ backlash ດຽວ.ການດຸ່ນດ່ຽງຄວາມແມ່ນຍໍາການເຄື່ອນໄຫວຄວາມໄວສູງແລະຄວາມໄວຕ່ໍາ, ເຊັ່ນດຽວກັນກັບການແກ້ໄຂການປັບປຸງກົນຈັກ, ກາຍເປັນສິ່ງທ້າທາຍ.ຍິ່ງໄປກວ່ານັ້ນ, ຄ່າ deviation ປີ້ນກັບກັນທີ່ວັດແທກໃນລະຫວ່າງການເຄື່ອນທີ່ຢ່າງໄວວາສາມາດຖືກນໍາໃຊ້ເປັນມູນຄ່າການຊົດເຊີຍການປ້ອນຂໍ້ມູນເທົ່ານັ້ນ.ດັ່ງນັ້ນ, ການບັນລຸຄວາມສົມດຸນລະຫວ່າງຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຢ່າງໄວວາແລະຄວາມຖືກຕ້ອງຂອງ interpolation ໃນລະຫວ່າງການຕັດແມ່ນເປັນການຍາກ.

ສໍາລັບລະບົບ CNC ເຊັ່ນ FANUC0i ແລະ FANUC18i, ມີສອງຮູບແບບທີ່ມີຢູ່ຂອງການຊົດເຊີຍ backlash ສໍາລັບການເຄື່ອນໄຫວຢ່າງໄວວາ (G00) ແລະການເຄື່ອນໄຫວຂອງອາຫານການຕັດຄວາມໄວຊ້າ (G01).ອີງຕາມວິທີການໃຫ້ອາຫານທີ່ເລືອກ, ລະບົບ CNC ອັດຕະໂນມັດເລືອກແລະນໍາໃຊ້ມູນຄ່າການຊົດເຊີຍທີ່ແຕກຕ່າງເພື່ອບັນລຸຄວາມແມ່ນຍໍາຂອງການປຸງແຕ່ງ.
ຄ່າ backlash A, ທີ່ໄດ້ຮັບຈາກ G01 ການຕັດ feed motion, ຄວນຈະເຂົ້າໄປໃນພາລາມິເຕີ NO11851 (ຄວາມໄວການທົດລອງ G01 ຄວນຖືກກໍານົດໂດຍອີງໃສ່ຄວາມໄວຂອງອາຫານການຕັດທີ່ໃຊ້ທົ່ວໄປແລະຄຸນລັກສະນະຂອງເຄື່ອງຈັກ), ໃນຂະນະທີ່ມູນຄ່າ backlash B ຈາກ G00 ຄວນຖືກປ້ອນ. ເຂົ້າໄປໃນພາລາມິເຕີ NO11852.ມັນເປັນສິ່ງສໍາຄັນທີ່ຄວນສັງເກດວ່າຖ້າລະບົບ CNC ຊອກຫາການປະຕິບັດການຊົດເຊີຍ backlash reverse ທີ່ກໍານົດແຍກຕ່າງຫາກ, ຕົວເລກທີ່ສີ່ (RBK) ຂອງພາລາມິເຕີເລກ 1800 ຕ້ອງຖືກຕັ້ງເປັນ 1;ຖ້າບໍ່ດັ່ງນັ້ນ, ການຊົດເຊີຍ backlash ທີ່ລະບຸໄວ້ແຍກຕ່າງຫາກຈະບໍ່ຖືກປະຕິບັດ.ການຊົດເຊີຍຊ່ອງຫວ່າງ.G02, G03, JOG, ແລະ G01 ທັງໝົດໃຊ້ຄ່າຊົດເຊີຍດຽວກັນ.

ການຊົດເຊີຍສໍາລັບຄວາມຜິດພາດ Pitch
ການຈັດຕໍາແຫນ່ງທີ່ຊັດເຈນຂອງເຄື່ອງມືເຄື່ອງຈັກ CNC ກ່ຽວຂ້ອງກັບການປະເມີນຄວາມຖືກຕ້ອງທີ່ອົງປະກອບເຄື່ອນທີ່ຂອງເຄື່ອງມືເຄື່ອງຈັກສາມາດບັນລຸພາຍໃຕ້ຄໍາສັ່ງຂອງລະບົບ CNC.ຄວາມແມ່ນຍໍານີ້ມີບົດບາດສໍາຄັນໃນການຈໍາແນກເຄື່ອງມືເຄື່ອງຈັກ CNC ຈາກແບບດັ້ງເດີມ.ສອດຄ່ອງກັບຄວາມແມ່ນຍໍາທາງເລຂາຄະນິດຂອງເຄື່ອງມືເຄື່ອງຈັກ, ມັນມີຜົນກະທົບຢ່າງຫຼວງຫຼາຍຕໍ່ຄວາມແມ່ນຍໍາຂອງການຕັດ, ໂດຍສະເພາະໃນເຄື່ອງຈັກຮູ.ຄວາມຜິດພາດຂອງ pitch ໃນການເຈາະຂຸມມີຜົນກະທົບຢ່າງຫຼວງຫຼາຍ.ຄວາມສາມາດຂອງເຄື່ອງມືເຄື່ອງ CNC ເພື່ອປະເມີນຄວາມແມ່ນຍໍາໃນການປຸງແຕ່ງຂອງມັນຂຶ້ນຢູ່ກັບຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງທີ່ບັນລຸໄດ້.ດັ່ງນັ້ນ, ການກວດສອບແລະການແກ້ໄຂຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຂອງເຄື່ອງຈັກ CNC ແມ່ນມາດຕະການທີ່ຈໍາເປັນເພື່ອຮັບປະກັນຄຸນນະພາບການປຸງແຕ່ງ.
ຂະບວນການວັດແທກລະດັບສຽງ
ໃນປັດຈຸບັນ, ວິທີການຕົ້ນຕໍສໍາລັບການປະເມີນຜົນແລະການຈັດການເຄື່ອງມືເຄື່ອງຈັກແມ່ນການນໍາໃຊ້ສອງຄວາມຖີ່ laser interferometers.interferometers ເຫຼົ່ານີ້ດໍາເນີນການກ່ຽວກັບຫຼັກການຂອງ interferometry laser ແລະນໍາໃຊ້ wavelength laser ໃນເວລາທີ່ແທ້ຈິງເປັນການອ້າງອິງສໍາລັບການວັດແທກ, ດັ່ງນັ້ນການເພີ່ມຄວາມແມ່ນຍໍາຂອງການວັດແທກແລະການຂະຫຍາຍຂອບເຂດຂອງຄໍາຮ້ອງສະຫມັກ.
ຂະບວນການສໍາລັບການກວດສອບ pitch ແມ່ນດັ່ງຕໍ່ໄປນີ້:
- ຕິດຕັ້ງເລເຊີ interferometer ສອງຄວາມຖີ່.
- ວາງອຸປະກອນວັດແທກ optical ຕາມແກນຂອງເຄື່ອງມືເຄື່ອງຈັກທີ່ຕ້ອງການການວັດແທກ.
- ຈັດຮຽງຫົວເລເຊີເພື່ອຮັບປະກັນວ່າແກນວັດແທກແມ່ນຂະຫນານຫຼື collinear ກັບແກນການເຄື່ອນໄຫວຂອງເຄື່ອງມືເຄື່ອງຈັກ, ດັ່ງນັ້ນ pre-aligning ເສັ້ນທາງ optical.
- ໃສ່ຕົວກໍານົດການວັດແທກເມື່ອເລເຊີຮອດອຸນຫະພູມປະຕິບັດງານ.
- ປະຕິບັດຂັ້ນຕອນການວັດແທກທີ່ກໍານົດໄວ້ໂດຍການຍ້າຍເຄື່ອງມືເຄື່ອງຈັກ.
- ປະມວນຜົນຂໍ້ມູນແລະສ້າງຜົນໄດ້ຮັບ.
Pitch ການຊົດເຊີຍຄວາມຜິດພາດແລະການປັບອັດຕະໂນມັດ
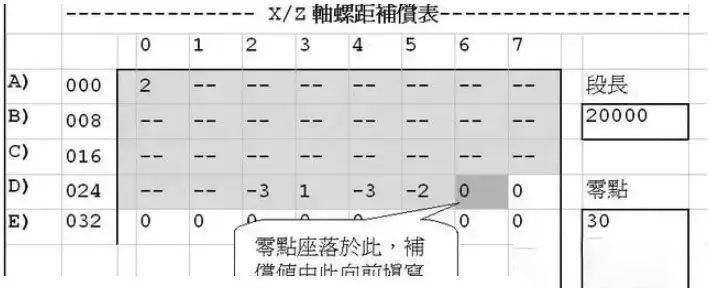
ເມື່ອຄວາມຜິດພາດການຈັດຕໍາແຫນ່ງທີ່ວັດແທກຂອງເຄື່ອງມື CNC ເກີນຂອບເຂດທີ່ອະນຸຍາດ, ມັນຈໍາເປັນຕ້ອງແກ້ໄຂຂໍ້ຜິດພາດ.ຫນຶ່ງໃນວິທີການທີ່ແຜ່ຫຼາຍກ່ຽວຂ້ອງກັບການຄິດໄລ່ຕາຕະລາງການຊົດເຊີຍຄວາມຜິດພາດ pitch ແລະປ້ອນມັນດ້ວຍຕົນເອງເຂົ້າໄປໃນລະບົບ CNC ຂອງເຄື່ອງມືເຄື່ອງຈັກເພື່ອແກ້ໄຂຄວາມຜິດພາດການຈັດຕໍາແຫນ່ງ.ຢ່າງໃດກໍ່ຕາມ, ການຊົດເຊີຍຄູ່ມືສາມາດໃຊ້ເວລາຫຼາຍແລະມີຄວາມສ່ຽງຕໍ່ຄວາມຜິດພາດ, ໂດຍສະເພາະໃນເວລາທີ່ຈັດການກັບຈຸດການຊົດເຊີຍຈໍານວນຫລາຍໃນທົ່ວສາມຫຼືສີ່ແກນຂອງເຄື່ອງມື CNC.
ເພື່ອປັບປຸງຂະບວນການນີ້, ການແກ້ໄຂໄດ້ຖືກພັດທະນາ.ໂດຍການເຊື່ອມຕໍ່ຄອມພິວເຕີແລະເຄື່ອງຄວບຄຸມ CNC ຂອງເຄື່ອງມືເຄື່ອງຈັກໂດຍຜ່ານການໂຕ້ຕອບ RS232 ແລະນໍາໃຊ້ຊອບແວການປັບອັດຕະໂນມັດທີ່ສ້າງຂຶ້ນໃນ VB, ມັນເປັນໄປໄດ້ທີ່ຈະ synchronize laser interferometer ແລະເຄື່ອງມືເຄື່ອງ CNC.synchronization ນີ້ເຮັດໃຫ້ການກວດສອບອັດຕະໂນມັດຂອງຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຂອງເຄື່ອງມື CNC ແລະການປະຕິບັດການຊົດເຊີຍຄວາມຜິດພາດ pitch ອັດຕະໂນມັດ.ວິທີການຊົດເຊີຍປະກອບມີ:
- ການສ້າງສໍາຮອງຂໍ້ມູນຂອງຕົວກໍານົດການຊົດເຊີຍທີ່ມີຢູ່ໃນລະບົບການຄວບຄຸມ CNC.
- ການຜະລິດເຄື່ອງມືເຄື່ອງຈັກ CNC ໂຄງການສໍາລັບການວັດແທກຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງຈຸດໂດຍຈຸດໂດຍໃຊ້ຄອມພິວເຕີ, ເຊິ່ງຫຼັງຈາກນັ້ນຖືກສົ່ງໄປຫາລະບົບ CNC.
- ອັດຕະໂນມັດການວັດແທກຄວາມຜິດພາດການຈັດຕໍາແຫນ່ງຂອງແຕ່ລະຈຸດ.
- ການສ້າງຊຸດໃຫມ່ຂອງຕົວກໍານົດການຊົດເຊີຍໂດຍອີງໃສ່ຈຸດການຊົດເຊີຍທີ່ໄດ້ກໍານົດໄວ້ລ່ວງຫນ້າແລະສົ່ງໃຫ້ພວກເຂົາກັບລະບົບ CNC ສໍາລັບການຊົດເຊີຍ pitch ອັດຕະໂນມັດ.
- ກວດສອບຄວາມຖືກຕ້ອງຊ້ຳໆ.
ການແກ້ໄຂສະເພາະເຫຼົ່ານີ້ມີຈຸດປະສົງເພື່ອເສີມຂະຫຍາຍຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງ CNC.ຢ່າງໃດກໍຕາມ, ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຕ້ອງສັງເກດວ່າຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ CNC ທີ່ແຕກຕ່າງກັນອາດຈະແຕກຕ່າງກັນ.ດັ່ງນັ້ນ, ເຄື່ອງມືເຄື່ອງຈັກຄວນໄດ້ຮັບການປັບຕົວຕາມສະຖານະການແຕ່ລະຄົນ.
ຖ້າການຊົດເຊີຍຄວາມຜິດພາດບໍ່ໄດ້ປະຕິບັດໃນເຄື່ອງມືເຄື່ອງຈັກ, ມັນຈະມີຜົນກະທົບແນວໃດຕໍ່ຊິ້ນສ່ວນ CNC ທີ່ຜະລິດ?
ຖ້າການຊົດເຊີຍຄວາມຜິດພາດຖືກມອງຂ້າມໃນເຄື່ອງມືເຄື່ອງຈັກ, ມັນສາມາດສົ່ງຜົນໃຫ້ຄວາມແຕກຕ່າງໃນຊິ້ນສ່ວນ CNCຜະລິດ.ຕົວຢ່າງເຊັ່ນ, ຖ້າເຄື່ອງມືເຄື່ອງຈັກມີຄວາມຜິດພາດໃນການຈັດຕໍາແຫນ່ງທີ່ບໍ່ໄດ້ຮັບການປັບຕົວ, ຕໍາແຫນ່ງທີ່ແທ້ຈິງຂອງເຄື່ອງມືຫຼື workpiece ອາດຈະແຕກຕ່າງຈາກຕໍາແຫນ່ງທີ່ກໍານົດໄວ້ໃນໂຄງການ CNC, ນໍາໄປສູ່ຄວາມບໍ່ແນ່ນອນດ້ານມິຕິແລະຄວາມຜິດພາດທາງເລຂາຄະນິດໃນພາກສ່ວນທີ່ຜະລິດ.
ຕົວຢ່າງ, ຖ້າເຄື່ອງໂມ້ CNC ມີຄວາມຜິດພາດໃນການຈັດຕໍາແຫນ່ງທີ່ບໍ່ໄດ້ປັບຕົວຢູ່ໃນແກນ X, ຊ່ອງ milled ຫຼືຮູໃນ workpiece ອາດຈະບໍ່ຖືກຕ້ອງຫຼືມີຂະຫນາດທີ່ບໍ່ຖືກຕ້ອງ.ເຊັ່ນດຽວກັນ, ໃນການດໍາເນີນງານເຄື່ອງກຶງ, ຄວາມຜິດພາດການຈັດຕໍາແຫນ່ງທີ່ບໍ່ຖືກປັບສາມາດເຮັດໃຫ້ເກີດຄວາມບໍ່ແນ່ນອນຂອງເສັ້ນຜ່າກາງຫຼືຄວາມຍາວຂອງພາກສ່ວນທີ່ຫັນ.ຄວາມແຕກຕ່າງເຫຼົ່ານີ້ອາດຈະເຮັດໃຫ້ສ່ວນທີ່ບໍ່ສອດຄ່ອງກັນທີ່ລົ້ມເຫລວ
Anebon will make each hard work to become excellent and excellent, and speed up our measures for standing from the rank of intercontinental top-grade and high-tech enterprises for China Gold Supplier for OEM, Customບໍລິການເຄື່ອງຈັກ cnc, ບໍລິການຜະລິດແຜ່ນໂລຫະ, ບໍລິການໂຮງສີ.Anebon ຈະເຮັດການຊື້ສ່ວນບຸກຄົນຂອງທ່ານເພື່ອຕອບສະຫນອງຄວາມພໍໃຈຂອງທ່ານເອງ!ທຸລະກິດຂອງ Anebon ສ້າງຕັ້ງຫຼາຍພະແນກ, ລວມທັງພະແນກຜົນຜະລິດ, ພະແນກລາຍຮັບ, ພະແນກຄວບຄຸມທີ່ດີເລີດແລະສູນບໍລິການ, ແລະອື່ນໆ.
ໂຮງງານຜະລິດຈີນສ່ວນ Precision ແລະສ່ວນອາລູມິນຽມ, ທ່ານສາມາດໃຫ້ Anebon ຮູ້ວ່າຄວາມຄິດຂອງທ່ານທີ່ຈະພັດທະນາການອອກແບບທີ່ເປັນເອກະລັກສໍາລັບຕົວແບບຂອງທ່ານເອງເພື່ອປ້ອງກັນບໍ່ໃຫ້ພາກສ່ວນທີ່ຄ້າຍຄືກັນຫຼາຍເກີນໄປໃນຕະຫຼາດ!ພວກເຮົາຈະໃຫ້ບໍລິການທີ່ດີທີ່ສຸດຂອງພວກເຮົາເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງທ່ານທັງຫມົດ!ຢ່າລືມຕິດຕໍ່ Anebon ທັນທີ!
ເວລາປະກາດ: 09-09-2024