
CNC ਮਸ਼ੀਨ ਟੂਲ ਉਪਕਰਣ ਦੀ ਕੁਸ਼ਲਤਾ ਇਸਦੀ ਸ਼ੁੱਧਤਾ ਨਾਲ ਨੇੜਿਓਂ ਜੁੜੀ ਹੋਈ ਹੈ, ਇਸ ਨੂੰ ਕੰਪਨੀਆਂ ਲਈ ਅਜਿਹੇ ਟੂਲ ਖਰੀਦਣ ਜਾਂ ਵਿਕਸਤ ਕਰਨ ਵੇਲੇ ਇੱਕ ਪ੍ਰਮੁੱਖ ਤਰਜੀਹ ਬਣਾਉਂਦੀ ਹੈ।ਹਾਲਾਂਕਿ, ਜ਼ਿਆਦਾਤਰ ਨਵੇਂ ਮਸ਼ੀਨ ਟੂਲਸ ਦੀ ਸ਼ੁੱਧਤਾ ਫੈਕਟਰੀ ਛੱਡਣ 'ਤੇ ਲੋੜੀਂਦੇ ਮਾਪਦੰਡਾਂ ਤੋਂ ਘੱਟ ਹੁੰਦੀ ਹੈ।ਇਸ ਤੋਂ ਇਲਾਵਾ, ਲੰਬੇ ਸਮੇਂ ਤੱਕ ਵਰਤੋਂ ਦੌਰਾਨ ਮਕੈਨੀਕਲ ਰਨ-ਇਨ ਅਤੇ ਪਹਿਨਣ ਦੀ ਮੌਜੂਦਗੀ ਸਰਵੋਤਮ ਉਤਪਾਦਨ ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ CNC ਮਸ਼ੀਨ ਟੂਲਸ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਅਨੁਕੂਲ ਕਰਨ ਦੀ ਮਹੱਤਵਪੂਰਣ ਜ਼ਰੂਰਤ 'ਤੇ ਜ਼ੋਰ ਦਿੰਦੀ ਹੈ।
1. ਬੈਕਲੈਸ਼ ਮੁਆਵਜ਼ਾ
CNC ਮਸ਼ੀਨ ਟੂਲਸ ਦੇ ਅੰਦਰ ਬੈਕਲੈਸ਼ ਨੂੰ ਘਟਾਉਣਾ, ਹਰੇਕ ਕੋਆਰਡੀਨੇਟ ਧੁਰੇ ਦੀ ਫੀਡ ਟਰਾਂਸਮਿਸ਼ਨ ਚੇਨ 'ਤੇ ਡ੍ਰਾਈਵਿੰਗ ਕੰਪੋਨੈਂਟਸ ਦੇ ਰਿਵਰਸ ਡੈੱਡ ਜ਼ੋਨ ਤੋਂ ਪੈਦਾ ਹੋਈਆਂ ਤਰੁੱਟੀਆਂ ਅਤੇ ਹਰੇਕ ਮਕੈਨੀਕਲ ਮੋਸ਼ਨ ਟਰਾਂਸਮਿਸ਼ਨ ਜੋੜੇ ਦੀ ਰਿਵਰਸ ਕਲੀਅਰੈਂਸ ਭਟਕਣਾ ਵੱਲ ਲੈ ਜਾਂਦੀ ਹੈ ਕਿਉਂਕਿ ਹਰੇਕ ਕੋਆਰਡੀਨੇਟ ਧੁਰੀ ਅੱਗੇ ਤੋਂ ਰਿਵਰਸ ਮੋਸ਼ਨ ਵਿੱਚ ਬਦਲਦਾ ਹੈ।ਇਹ ਭਟਕਣਾ, ਜਿਸ ਨੂੰ ਰਿਵਰਸ ਕਲੀਅਰੈਂਸ ਜਾਂ ਗੁਆਚਿਆ ਮੋਮੈਂਟਮ ਵੀ ਕਿਹਾ ਜਾਂਦਾ ਹੈ, ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਅਤੇ ਦੁਹਰਾਉਣ ਵਾਲੀ ਸਥਿਤੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਮਹੱਤਵਪੂਰਨ ਤੌਰ 'ਤੇ ਪ੍ਰਭਾਵਿਤ ਕਰ ਸਕਦਾ ਹੈ ਜਦੋਂ ਅਰਧ-ਬੰਦ-ਲੂਪ ਸਰਵੋ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।ਇਸ ਤੋਂ ਇਲਾਵਾ, ਸਮੇਂ ਦੇ ਨਾਲ ਪਹਿਨਣ ਦੇ ਕਾਰਨ ਕਿਨੇਮੈਟਿਕ ਜੋੜਾ ਕਲੀਅਰੈਂਸ ਵਿੱਚ ਹੌਲੀ-ਹੌਲੀ ਵਾਧਾ ਰਿਵਰਸ ਡਿਵੀਏਸ਼ਨ ਵਿੱਚ ਇੱਕ ਅਨੁਸਾਰੀ ਵਾਧਾ ਵੱਲ ਖੜਦਾ ਹੈ।ਇਸ ਲਈ, ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਹਰੇਕ ਕੋਆਰਡੀਨੇਟ ਧੁਰੇ ਦੇ ਉਲਟ ਵਿਵਹਾਰ ਲਈ ਨਿਯਮਤ ਮਾਪ ਅਤੇ ਮੁਆਵਜ਼ਾ ਲਾਜ਼ਮੀ ਹੈ।

ਬੈਕਲੈਸ਼ ਨੂੰ ਮਾਪਣਾ
ਰਿਵਰਸ ਡਿਵੀਏਸ਼ਨ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ, ਕੋਆਰਡੀਨੇਟ ਧੁਰੇ ਦੀ ਯਾਤਰਾ ਸੀਮਾ ਦੇ ਅੰਦਰ ਸ਼ੁਰੂ ਕਰੋ।ਪਹਿਲਾਂ, ਅੱਗੇ ਜਾਂ ਉਲਟ ਦਿਸ਼ਾ ਵਿੱਚ ਇੱਕ ਨਿਰਧਾਰਿਤ ਦੂਰੀ ਨੂੰ ਹਿਲਾ ਕੇ ਇੱਕ ਹਵਾਲਾ ਬਿੰਦੂ ਸਥਾਪਤ ਕਰੋ।ਇਸਦੇ ਬਾਅਦ, ਇੱਕ ਖਾਸ ਦੂਰੀ ਨੂੰ ਕਵਰ ਕਰਨ ਲਈ ਉਸੇ ਦਿਸ਼ਾ ਵਿੱਚ ਇੱਕ ਖਾਸ ਮੂਵਮੈਂਟ ਕਮਾਂਡ ਜਾਰੀ ਕਰੋ।ਅੱਗੇ, ਉਲਟ ਦਿਸ਼ਾ ਵਿੱਚ ਸਮਾਨ ਦੂਰੀ ਨੂੰ ਅੱਗੇ ਵਧਾਉਣ ਲਈ ਅੱਗੇ ਵਧੋ ਅਤੇ ਸੰਦਰਭ ਅਤੇ ਸਟਾਪ ਪੁਜ਼ੀਸ਼ਨਾਂ ਵਿਚਕਾਰ ਅੰਤਰ ਨਿਰਧਾਰਤ ਕਰੋ।ਆਮ ਤੌਰ 'ਤੇ, ਕਈ ਮਾਪ (ਅਕਸਰ ਸੱਤ) ਮੱਧ ਬਿੰਦੂ ਦੇ ਨੇੜੇ ਤਿੰਨ ਸਥਾਨਾਂ ਅਤੇ ਯਾਤਰਾ ਦੀ ਸੀਮਾ ਦੇ ਦੋਵਾਂ ਸਿਰਿਆਂ 'ਤੇ ਕੀਤੇ ਜਾਂਦੇ ਹਨ।ਔਸਤ ਮੁੱਲ ਦੀ ਫਿਰ ਹਰੇਕ ਟਿਕਾਣੇ 'ਤੇ ਗਣਨਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਇਹਨਾਂ ਔਸਤਾਂ ਵਿੱਚੋਂ ਅਧਿਕਤਮ ਨੂੰ ਰਿਵਰਸ ਡਿਵੀਏਸ਼ਨ ਲਈ ਮਾਪ ਵਜੋਂ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।ਰਿਵਰਸ ਡਿਵੀਏਸ਼ਨ ਮੁੱਲ ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਮਾਪਾਂ ਦੌਰਾਨ ਇੱਕ ਖਾਸ ਦੂਰੀ ਨੂੰ ਹਿਲਾਉਣਾ ਜ਼ਰੂਰੀ ਹੈ।

ਇੱਕ ਰੇਖਿਕ ਮੋਸ਼ਨ ਧੁਰੇ ਦੇ ਉਲਟ ਵਿਵਹਾਰ ਦਾ ਮੁਲਾਂਕਣ ਕਰਦੇ ਸਮੇਂ, ਇੱਕ ਡਾਇਲ ਇੰਡੀਕੇਟਰ ਜਾਂ ਡਾਇਲ ਗੇਜ ਨੂੰ ਮਾਪ ਟੂਲ ਵਜੋਂ ਨਿਯੁਕਤ ਕਰਨਾ ਆਮ ਗੱਲ ਹੈ।ਜੇ ਹਾਲਾਤ ਇਜਾਜ਼ਤ ਦਿੰਦੇ ਹਨ, ਤਾਂ ਇਸ ਉਦੇਸ਼ ਲਈ ਦੋਹਰੀ-ਫ੍ਰੀਕੁਐਂਸੀ ਲੇਜ਼ਰ ਇੰਟਰਫੇਰੋਮੀਟਰ ਦੀ ਵੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ।ਮਾਪਾਂ ਲਈ ਡਾਇਲ ਇੰਡੀਕੇਟਰ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ, ਇਹ ਯਕੀਨੀ ਬਣਾਉਣਾ ਜ਼ਰੂਰੀ ਹੈ ਕਿ ਮੀਟਰ ਬੇਸ ਅਤੇ ਸਟੈਮ ਬਹੁਤ ਜ਼ਿਆਦਾ ਨਾ ਫੈਲੇ, ਕਿਉਂਕਿ ਮਾਪ ਦੇ ਦੌਰਾਨ ਇੱਕ ਲੰਬਾ ਕੈਨਟੀਲੀਵਰ ਮੀਟਰ ਬੇਸ ਨੂੰ ਫੋਰਸ ਦੇ ਕਾਰਨ ਹਿਲਾਉਣ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਗਲਤ ਰੀਡਿੰਗ ਅਤੇ ਗੈਰ-ਵਾਸਤਵਿਕ ਮੁਆਵਜ਼ੇ ਦੇ ਮੁੱਲ ਹੋ ਸਕਦੇ ਹਨ।
ਮਾਪ ਲਈ ਇੱਕ ਪ੍ਰੋਗਰਾਮਿੰਗ ਵਿਧੀ ਨੂੰ ਲਾਗੂ ਕਰਨਾ ਪ੍ਰਕਿਰਿਆ ਦੀ ਸਹੂਲਤ ਅਤੇ ਸ਼ੁੱਧਤਾ ਨੂੰ ਵਧਾ ਸਕਦਾ ਹੈ।ਉਦਾਹਰਨ ਲਈ, ਤਿੰਨ-ਕੋਆਰਡੀਨੇਟ ਵਰਟੀਕਲ ਮਸ਼ੀਨ ਟੂਲ 'ਤੇ X-ਧੁਰੇ ਦੇ ਉਲਟੇ ਵਿਵਹਾਰ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ, ਪ੍ਰਕਿਰਿਆ ਸਪਿੰਡਲ ਦੀ ਸਿਲੰਡਰ ਸਤਹ ਦੇ ਵਿਰੁੱਧ ਮੀਟਰ ਨੂੰ ਦਬਾ ਕੇ ਸ਼ੁਰੂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਇਸ ਤੋਂ ਬਾਅਦ ਮਾਪ ਲਈ ਇੱਕ ਮਨੋਨੀਤ ਪ੍ਰੋਗਰਾਮ ਚਲਾ ਕੇ।
N10G91G01X50F1000;ਵਰਕਬੈਂਚ ਨੂੰ ਸੱਜੇ ਪਾਸੇ ਲੈ ਜਾਓ
N20X-50;ਟਰਾਂਸਮਿਸ਼ਨ ਗੈਪ ਨੂੰ ਖਤਮ ਕਰਨ ਲਈ ਵਰਕਟੇਬਲ ਖੱਬੇ ਪਾਸੇ ਚਲੀ ਜਾਂਦੀ ਹੈ
N30G04X5;ਨਿਰੀਖਣ ਲਈ ਵਿਰਾਮ
N40Z50;Z-ਧੁਰਾ ਉੱਚਾ ਹੋਇਆ ਅਤੇ ਰਸਤੇ ਤੋਂ ਬਾਹਰ
N50X-50: ਵਰਕਬੈਂਚ ਖੱਬੇ ਪਾਸੇ ਚਲੀ ਜਾਂਦੀ ਹੈ
N60X50: ਵਰਕਬੈਂਚ ਸੱਜੇ ਪਾਸੇ ਜਾਂਦਾ ਹੈ ਅਤੇ ਰੀਸੈੱਟ ਕਰਦਾ ਹੈ
N70Z-50: Z ਧੁਰਾ ਰੀਸੈੱਟ
N80G04X5: ਨਿਰੀਖਣ ਲਈ ਰੁਕੋ
N90M99;
ਇਹ ਨੋਟ ਕਰਨਾ ਮਹੱਤਵਪੂਰਨ ਹੈ ਕਿ ਵਰਕਬੈਂਚ ਦੀਆਂ ਵੱਖ-ਵੱਖ ਓਪਰੇਟਿੰਗ ਸਪੀਡਾਂ ਦੇ ਆਧਾਰ 'ਤੇ ਮਾਪੇ ਗਏ ਨਤੀਜੇ ਵੱਖ-ਵੱਖ ਹੋ ਸਕਦੇ ਹਨ।ਆਮ ਤੌਰ 'ਤੇ, ਘੱਟ ਗਤੀ 'ਤੇ ਮਾਪਿਆ ਗਿਆ ਮੁੱਲ ਉੱਚ ਰਫਤਾਰ ਨਾਲੋਂ ਵੱਧ ਹੁੰਦਾ ਹੈ, ਖਾਸ ਤੌਰ 'ਤੇ ਜਦੋਂ ਮਸ਼ੀਨ ਟੂਲ ਐਕਸਿਸ ਲੋਡ ਅਤੇ ਮੋਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਕਾਫ਼ੀ ਹੁੰਦਾ ਹੈ।ਘੱਟ ਗਤੀ 'ਤੇ, ਵਰਕਟੇਬਲ ਹੌਲੀ ਰਫਤਾਰ ਨਾਲ ਅੱਗੇ ਵਧਦਾ ਹੈ, ਨਤੀਜੇ ਵਜੋਂ ਓਵਰਸ਼ੂਟ ਅਤੇ ਓਵਰਟ੍ਰੈਵਲ ਦੀ ਘੱਟ ਸੰਭਾਵਨਾ ਹੁੰਦੀ ਹੈ, ਇਸਲਈ ਉੱਚ ਮਾਪਿਆ ਮੁੱਲ ਪ੍ਰਾਪਤ ਹੁੰਦਾ ਹੈ।ਦੂਜੇ ਪਾਸੇ, ਉੱਚ ਰਫਤਾਰ 'ਤੇ, ਤੇਜ਼ ਵਰਕਟੇਬਲ ਗਤੀ ਦੇ ਕਾਰਨ ਓਵਰਸ਼ੂਟ ਅਤੇ ਓਵਰਟੈਵਲ ਹੋਣ ਦੀ ਜ਼ਿਆਦਾ ਸੰਭਾਵਨਾ ਹੁੰਦੀ ਹੈ, ਨਤੀਜੇ ਵਜੋਂ ਇੱਕ ਛੋਟਾ ਮਾਪਿਆ ਮੁੱਲ ਹੁੰਦਾ ਹੈ।ਰੋਟਰੀ ਮੋਸ਼ਨ ਧੁਰੇ ਦੇ ਉਲਟ ਵਿਵਹਾਰ ਲਈ ਮਾਪ ਦੀ ਪਹੁੰਚ ਰੇਖਿਕ ਧੁਰੀ ਦੇ ਸਮਾਨ ਪ੍ਰਕਿਰਿਆ ਦੀ ਪਾਲਣਾ ਕਰਦੀ ਹੈ, ਸਿਰਫ ਅੰਤਰ ਖੋਜ ਲਈ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਸਾਧਨ ਹੈ।

ਬੈਕਲੈਸ਼ ਲਈ ਮੁਆਵਜ਼ਾ ਦੇਣਾ
ਦੇਸ਼ ਵਿੱਚ ਬਣੇ ਬਹੁਤ ਸਾਰੇ CNC ਮਸ਼ੀਨ ਟੂਲ 0.02mm ਤੋਂ ਵੱਧ ਦੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦੇ ਹਨ, ਫਿਰ ਵੀ ਮੁਆਵਜ਼ੇ ਲਈ ਸਮਰੱਥਾ ਦੀ ਘਾਟ ਹੈ।ਕੁਝ ਸਥਿਤੀਆਂ ਵਿੱਚ, ਇੱਕ ਤਰਫਾ ਸਥਿਤੀ ਨੂੰ ਪੂਰਾ ਕਰਨ ਅਤੇ ਅਜਿਹੇ ਮਸ਼ੀਨ ਟੂਲਸ ਲਈ ਬੈਕਲੈਸ਼ ਨੂੰ ਖਤਮ ਕਰਨ ਲਈ ਪ੍ਰੋਗਰਾਮਿੰਗ ਤਕਨੀਕਾਂ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ।ਜਿੰਨਾ ਚਿਰ ਮਕੈਨੀਕਲ ਕੰਪੋਨੈਂਟ ਬਦਲਿਆ ਨਹੀਂ ਰਹਿੰਦਾ ਹੈ, ਇੰਟਰਪੋਲੇਸ਼ਨ ਪ੍ਰੋਸੈਸਿੰਗ ਸ਼ੁਰੂ ਕਰਨਾ ਸੰਭਵ ਹੈ ਜਦੋਂ ਘੱਟ-ਗਤੀ, ਇਕ-ਪਾਸੜ ਸਥਿਤੀ ਇੰਟਰਪੋਲੇਸ਼ਨ ਲਈ ਸ਼ੁਰੂਆਤੀ ਬਿੰਦੂ ਤੱਕ ਪਹੁੰਚ ਜਾਂਦੀ ਹੈ।ਜਦੋਂ ਇੰਟਰਪੋਲੇਸ਼ਨ ਫੀਡ ਦੇ ਦੌਰਾਨ ਉਲਟ ਦਿਸ਼ਾ ਦਾ ਸਾਹਮਣਾ ਕਰਨਾ ਪੈਂਦਾ ਹੈ, ਤਾਂ ਰਿਵਰਸ ਕਲੀਅਰੈਂਸ ਮੁੱਲ ਨੂੰ ਰਸਮੀ ਤੌਰ 'ਤੇ ਇੰਟਰਪੋਲੇਟ ਕਰਨ ਨਾਲ ਇੰਟਰਪੋਲੇਸ਼ਨ ਪ੍ਰੋਸੈਸਿੰਗ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਵਧਾਉਣ ਅਤੇ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਢੰਗ ਨਾਲ ਪੂਰਾ ਕਰਨ ਦੀ ਸਮਰੱਥਾ ਹੁੰਦੀ ਹੈ।ਸੀਐਨਸੀ ਮਿਲਡ ਹਿੱਸਾਦੀ ਸਹਿਣਸ਼ੀਲਤਾ ਦੀਆਂ ਲੋੜਾਂ।
CNC ਮਸ਼ੀਨ ਟੂਲਸ ਦੀਆਂ ਹੋਰ ਕਿਸਮਾਂ ਲਈ, CNC ਡਿਵਾਈਸ ਵਿੱਚ ਮਲਟੀਪਲ ਮੈਮੋਰੀ ਐਡਰੈੱਸ ਆਮ ਤੌਰ 'ਤੇ ਹਰੇਕ ਧੁਰੇ ਦੇ ਬੈਕਲੈਸ਼ ਮੁੱਲ ਨੂੰ ਸਟੋਰ ਕਰਨ ਲਈ ਮਨੋਨੀਤ ਕੀਤੇ ਜਾਂਦੇ ਹਨ।ਜਦੋਂ ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਇੱਕ ਧੁਰੇ ਨੂੰ ਇਸਦੀ ਗਤੀ ਦੀ ਦਿਸ਼ਾ ਬਦਲਣ ਲਈ ਨਿਰਦੇਸ਼ਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ CNC ਡਿਵਾਈਸ ਆਪਣੇ ਆਪ ਹੀ ਧੁਰੇ ਦੇ ਬੈਕਲੈਸ਼ ਮੁੱਲ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰ ਲਵੇਗੀ, ਜੋ ਤਾਲਮੇਲ ਵਿਸਥਾਪਨ ਕਮਾਂਡ ਮੁੱਲ ਨੂੰ ਮੁਆਵਜ਼ਾ ਅਤੇ ਸੁਧਾਰ ਕਰਦਾ ਹੈ।ਇਹ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ ਕਿ ਮਸ਼ੀਨ ਟੂਲ ਨੂੰ ਕਮਾਂਡ ਪੋਜੀਸ਼ਨ 'ਤੇ ਸਹੀ ਢੰਗ ਨਾਲ ਰੱਖਿਆ ਜਾ ਸਕਦਾ ਹੈ ਅਤੇ ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਸ਼ੁੱਧਤਾ 'ਤੇ ਉਲਟ ਵਿਵਹਾਰ ਦੇ ਮਾੜੇ ਪ੍ਰਭਾਵ ਨੂੰ ਘਟਾਉਂਦਾ ਹੈ।
ਆਮ ਤੌਰ 'ਤੇ, CNC ਸਿਸਟਮ ਇੱਕ ਸਿੰਗਲ ਉਪਲਬਧ ਬੈਕਲੈਸ਼ ਮੁਆਵਜ਼ੇ ਦੇ ਮੁੱਲ ਨਾਲ ਲੈਸ ਹੁੰਦੇ ਹਨ।ਉੱਚ- ਅਤੇ ਘੱਟ-ਸਪੀਡ ਗਤੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਸੰਤੁਲਿਤ ਕਰਨਾ, ਅਤੇ ਨਾਲ ਹੀ ਮਕੈਨੀਕਲ ਸੁਧਾਰ ਨੂੰ ਸੰਬੋਧਿਤ ਕਰਨਾ, ਚੁਣੌਤੀਪੂਰਨ ਬਣ ਜਾਂਦਾ ਹੈ।ਇਸ ਤੋਂ ਇਲਾਵਾ, ਤੇਜ਼ ਗਤੀ ਦੇ ਦੌਰਾਨ ਮਾਪਿਆ ਗਿਆ ਰਿਵਰਸ ਡਿਵੀਏਸ਼ਨ ਮੁੱਲ ਸਿਰਫ ਇਨਪੁਟ ਮੁਆਵਜ਼ੇ ਦੇ ਮੁੱਲ ਵਜੋਂ ਵਰਤਿਆ ਜਾ ਸਕਦਾ ਹੈ।ਸਿੱਟੇ ਵਜੋਂ, ਕੱਟਣ ਦੌਰਾਨ ਤੇਜ਼ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਅਤੇ ਇੰਟਰਪੋਲੇਸ਼ਨ ਸ਼ੁੱਧਤਾ ਵਿਚਕਾਰ ਸੰਤੁਲਨ ਪ੍ਰਾਪਤ ਕਰਨਾ ਮੁਸ਼ਕਲ ਸਾਬਤ ਹੁੰਦਾ ਹੈ।

CNC ਸਿਸਟਮ ਜਿਵੇਂ ਕਿ FANUC0i ਅਤੇ FANUC18i ਲਈ, ਰੈਪਿਡ ਮੋਸ਼ਨ (G00) ਅਤੇ ਹੌਲੀ-ਸਪੀਡ ਕਟਿੰਗ ਫੀਡ ਮੋਸ਼ਨ (G01) ਲਈ ਬੈਕਲੈਸ਼ ਮੁਆਵਜ਼ੇ ਦੇ ਦੋ ਉਪਲਬਧ ਰੂਪ ਹਨ।ਚੁਣੀ ਗਈ ਫੀਡਿੰਗ ਵਿਧੀ 'ਤੇ ਨਿਰਭਰ ਕਰਦੇ ਹੋਏ, CNC ਸਿਸਟਮ ਵਧੀ ਹੋਈ ਪ੍ਰੋਸੈਸਿੰਗ ਸ਼ੁੱਧਤਾ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਆਪਣੇ ਆਪ ਹੀ ਵੱਖਰੇ ਮੁਆਵਜ਼ੇ ਦੇ ਮੁੱਲਾਂ ਦੀ ਚੋਣ ਕਰਦਾ ਹੈ ਅਤੇ ਵਰਤੋਂ ਕਰਦਾ ਹੈ।
G01 ਕੱਟਣ ਵਾਲੀ ਫੀਡ ਮੋਸ਼ਨ ਤੋਂ ਪ੍ਰਾਪਤ ਕੀਤੀ ਗਈ ਬੈਕਲੈਸ਼ ਵੈਲਯੂ A, ਨੂੰ ਪੈਰਾਮੀਟਰ NO11851 ਵਿੱਚ ਦਾਖਲ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ (G01 ਟ੍ਰਾਇਲ ਸਪੀਡ ਆਮ ਤੌਰ 'ਤੇ ਵਰਤੀ ਜਾਂਦੀ ਕਟਿੰਗ ਫੀਡ ਸਪੀਡ ਅਤੇ ਮਸ਼ੀਨ ਟੂਲ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੇ ਆਧਾਰ 'ਤੇ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਣੀ ਚਾਹੀਦੀ ਹੈ), ਜਦੋਂ ਕਿ G00 ਤੋਂ ਬੈਕਲੈਸ਼ ਮੁੱਲ B ਨੂੰ ਇਨਪੁਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਪੈਰਾਮੀਟਰ NO11852 ਵਿੱਚ।ਇਹ ਨੋਟ ਕਰਨਾ ਮਹੱਤਵਪੂਰਨ ਹੈ ਕਿ ਜੇਕਰ CNC ਸਿਸਟਮ ਵੱਖਰੇ ਤੌਰ 'ਤੇ ਨਿਰਧਾਰਤ ਰਿਵਰਸ ਬੈਕਲੈਸ਼ ਮੁਆਵਜ਼ੇ ਨੂੰ ਲਾਗੂ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਦਾ ਹੈ, ਤਾਂ ਪੈਰਾਮੀਟਰ ਨੰਬਰ 1800 ਦਾ ਚੌਥਾ ਅੰਕ (RBK) 1 'ਤੇ ਸੈੱਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ;ਨਹੀਂ ਤਾਂ, ਵੱਖਰੇ ਤੌਰ 'ਤੇ ਨਿਰਧਾਰਤ ਰਿਵਰਸ ਬੈਕਲੈਸ਼ ਮੁਆਵਜ਼ਾ ਨਹੀਂ ਲਿਆ ਜਾਵੇਗਾ।ਅੰਤਰ ਮੁਆਵਜ਼ਾ.G02, G03, JOG, ਅਤੇ G01 ਸਾਰੇ ਇੱਕੋ ਮੁਆਵਜ਼ੇ ਦੇ ਮੁੱਲ ਨੂੰ ਲਾਗੂ ਕਰਦੇ ਹਨ।

ਪਿੱਚ ਗਲਤੀਆਂ ਲਈ ਮੁਆਵਜ਼ਾ
ਸੀਐਨਸੀ ਮਸ਼ੀਨ ਟੂਲਜ਼ ਦੀ ਸ਼ੁੱਧਤਾ ਸਥਿਤੀ ਵਿੱਚ ਸ਼ੁੱਧਤਾ ਦਾ ਮੁਲਾਂਕਣ ਸ਼ਾਮਲ ਹੁੰਦਾ ਹੈ ਜਿਸ ਨਾਲ ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਚਲਣ ਯੋਗ ਹਿੱਸੇ ਸੀਐਨਸੀ ਸਿਸਟਮ ਦੀ ਕਮਾਂਡ ਦੇ ਅਧੀਨ ਪਹੁੰਚ ਸਕਦੇ ਹਨ।ਇਹ ਸ਼ੁੱਧਤਾ CNC ਮਸ਼ੀਨ ਟੂਲਸ ਨੂੰ ਪਰੰਪਰਾਗਤ ਲੋਕਾਂ ਤੋਂ ਵੱਖ ਕਰਨ ਵਿੱਚ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਭੂਮਿਕਾ ਨਿਭਾਉਂਦੀ ਹੈ।ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਜਿਓਮੈਟ੍ਰਿਕ ਸ਼ੁੱਧਤਾ ਦੇ ਨਾਲ ਇਕਸਾਰ, ਇਹ ਕੱਟਣ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਮਹੱਤਵਪੂਰਨ ਤੌਰ 'ਤੇ ਪ੍ਰਭਾਵਿਤ ਕਰਦਾ ਹੈ, ਖਾਸ ਤੌਰ 'ਤੇ ਮੋਰੀ ਮਸ਼ੀਨਿੰਗ ਵਿੱਚ।ਮੋਰੀ ਡ੍ਰਿਲਿੰਗ ਵਿੱਚ ਪਿੱਚ ਦੀ ਗਲਤੀ ਦਾ ਕਾਫੀ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ।ਇਸਦੀ ਪ੍ਰੋਸੈਸਿੰਗ ਸ਼ੁੱਧਤਾ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ ਇੱਕ CNC ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਯੋਗਤਾ ਪ੍ਰਾਪਤ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ 'ਤੇ ਨਿਰਭਰ ਕਰਦੀ ਹੈ।ਇਸ ਲਈ, ਸੀਐਨਸੀ ਮਸ਼ੀਨ ਟੂਲਸ ਦੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਦਾ ਪਤਾ ਲਗਾਉਣਾ ਅਤੇ ਸੁਧਾਰ ਕਰਨਾ ਪ੍ਰੋਸੈਸਿੰਗ ਗੁਣਵੱਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਜ਼ਰੂਰੀ ਉਪਾਅ ਹਨ।
ਪਿੱਚ ਮਾਪਣ ਦੀ ਪ੍ਰਕਿਰਿਆ
ਵਰਤਮਾਨ ਵਿੱਚ, ਮਸ਼ੀਨ ਟੂਲਸ ਦੇ ਮੁਲਾਂਕਣ ਅਤੇ ਪ੍ਰਬੰਧਨ ਲਈ ਪ੍ਰਾਇਮਰੀ ਵਿਧੀ ਦੋਹਰੀ-ਫ੍ਰੀਕੁਐਂਸੀ ਲੇਜ਼ਰ ਇੰਟਰਫੇਰੋਮੀਟਰਾਂ ਦੀ ਵਰਤੋਂ ਹੈ।ਇਹ ਇੰਟਰਫੇਰੋਮੀਟਰ ਲੇਜ਼ਰ ਇੰਟਰਫੇਰੋਮੀਟਰੀ ਦੇ ਸਿਧਾਂਤਾਂ 'ਤੇ ਕੰਮ ਕਰਦੇ ਹਨ ਅਤੇ ਮਾਪ ਲਈ ਸੰਦਰਭ ਵਜੋਂ ਅਸਲ-ਸਮੇਂ ਦੀ ਲੇਜ਼ਰ ਤਰੰਗ-ਲੰਬਾਈ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹਨ, ਇਸ ਤਰ੍ਹਾਂ ਮਾਪ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਵਧਾਉਂਦੇ ਹਨ ਅਤੇ ਐਪਲੀਕੇਸ਼ਨਾਂ ਦੀ ਰੇਂਜ ਦਾ ਵਿਸਤਾਰ ਕਰਦੇ ਹਨ।
ਪਿੱਚ ਦਾ ਪਤਾ ਲਗਾਉਣ ਦੀ ਪ੍ਰਕਿਰਿਆ ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹੈ:
- ਦੋਹਰੀ-ਫ੍ਰੀਕੁਐਂਸੀ ਲੇਜ਼ਰ ਇੰਟਰਫੇਰੋਮੀਟਰ ਸਥਾਪਿਤ ਕਰੋ।
- ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਧੁਰੇ ਦੇ ਨਾਲ ਇੱਕ ਆਪਟੀਕਲ ਮਾਪਣ ਵਾਲੇ ਯੰਤਰ ਦੀ ਸਥਿਤੀ ਰੱਖੋ ਜਿਸ ਲਈ ਮਾਪ ਦੀ ਲੋੜ ਹੈ।
- ਇਹ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਲੇਜ਼ਰ ਹੈਡ ਨੂੰ ਇਕਸਾਰ ਕਰੋ ਕਿ ਮਾਪ ਧੁਰਾ ਜਾਂ ਤਾਂ ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਗਤੀਸ਼ੀਲ ਧੁਰੀ ਦੇ ਸਮਾਨਾਂਤਰ ਜਾਂ ਸਮਤੰਦਰ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਆਪਟੀਕਲ ਮਾਰਗ ਨੂੰ ਪਹਿਲਾਂ ਤੋਂ ਇਕਸਾਰ ਕਰਨਾ।
- ਲੇਜ਼ਰ ਦੇ ਓਪਰੇਟਿੰਗ ਤਾਪਮਾਨ 'ਤੇ ਪਹੁੰਚਣ ਤੋਂ ਬਾਅਦ ਮਾਪ ਮਾਪਦੰਡਾਂ ਨੂੰ ਇਨਪੁਟ ਕਰੋ।
- ਮਸ਼ੀਨ ਟੂਲ ਨੂੰ ਮੂਵ ਕਰਕੇ ਨਿਰਧਾਰਤ ਮਾਪ ਪ੍ਰਕਿਰਿਆਵਾਂ ਨੂੰ ਚਲਾਓ।
- ਡੇਟਾ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕਰੋ ਅਤੇ ਨਤੀਜੇ ਤਿਆਰ ਕਰੋ.
ਪਿਚ ਗਲਤੀ ਮੁਆਵਜ਼ਾ ਅਤੇ ਆਟੋਮੈਟਿਕ ਕੈਲੀਬ੍ਰੇਸ਼ਨ
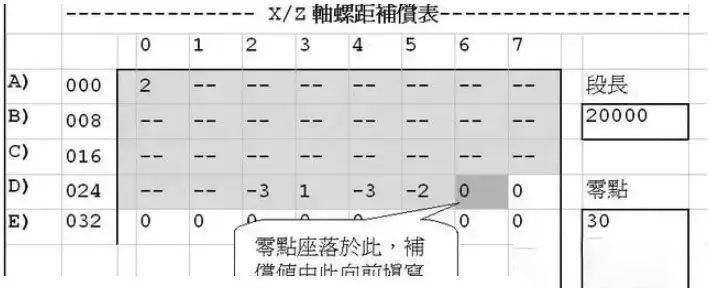
ਜਦੋਂ ਇੱਕ CNC ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਮਾਪੀ ਗਈ ਸਥਿਤੀ ਦੀ ਗਲਤੀ ਮਨਜ਼ੂਰਸ਼ੁਦਾ ਸੀਮਾ ਨੂੰ ਪਾਰ ਕਰ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਗਲਤੀ ਨੂੰ ਠੀਕ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।ਇੱਕ ਪ੍ਰਚਲਿਤ ਪਹੁੰਚ ਵਿੱਚ ਪਿਚ ਗਲਤੀ ਮੁਆਵਜ਼ਾ ਸਾਰਣੀ ਦੀ ਗਣਨਾ ਕਰਨਾ ਅਤੇ ਸਥਿਤੀ ਦੀ ਗਲਤੀ ਨੂੰ ਠੀਕ ਕਰਨ ਲਈ ਇਸਨੂੰ ਮਸ਼ੀਨ ਟੂਲ ਦੇ CNC ਸਿਸਟਮ ਵਿੱਚ ਹੱਥੀਂ ਇਨਪੁੱਟ ਕਰਨਾ ਸ਼ਾਮਲ ਹੈ।ਹਾਲਾਂਕਿ, ਦਸਤੀ ਮੁਆਵਜ਼ਾ ਸਮਾਂ ਬਰਬਾਦ ਕਰਨ ਵਾਲਾ ਅਤੇ ਗਲਤੀਆਂ ਦਾ ਸ਼ਿਕਾਰ ਹੋ ਸਕਦਾ ਹੈ, ਖਾਸ ਤੌਰ 'ਤੇ ਜਦੋਂ CNC ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਤਿੰਨ ਜਾਂ ਚਾਰ ਧੁਰਿਆਂ ਵਿੱਚ ਕਈ ਮੁਆਵਜ਼ੇ ਦੇ ਬਿੰਦੂਆਂ ਨਾਲ ਨਜਿੱਠਣਾ ਹੁੰਦਾ ਹੈ।
ਇਸ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਸੁਚਾਰੂ ਬਣਾਉਣ ਲਈ, ਇੱਕ ਹੱਲ ਵਿਕਸਿਤ ਕੀਤਾ ਗਿਆ ਹੈ.ਕੰਪਿਊਟਰ ਅਤੇ ਮਸ਼ੀਨ ਟੂਲ ਦੇ CNC ਕੰਟਰੋਲਰ ਨੂੰ RS232 ਇੰਟਰਫੇਸ ਦੁਆਰਾ ਲਿੰਕ ਕਰਨ ਅਤੇ VB ਵਿੱਚ ਬਣਾਏ ਗਏ ਆਟੋਮੈਟਿਕ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਸੌਫਟਵੇਅਰ ਦਾ ਲਾਭ ਲੈ ਕੇ, ਲੇਜ਼ਰ ਇੰਟਰਫੇਰੋਮੀਟਰ ਅਤੇ CNC ਮਸ਼ੀਨ ਟੂਲ ਨੂੰ ਸਮਕਾਲੀ ਕਰਨਾ ਸੰਭਵ ਹੈ।ਇਹ ਸਮਕਾਲੀਕਰਨ CNC ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਸਥਿਤੀ ਸ਼ੁੱਧਤਾ ਦੀ ਆਟੋਮੈਟਿਕ ਖੋਜ ਅਤੇ ਆਟੋਮੈਟਿਕ ਪਿੱਚ ਗਲਤੀ ਮੁਆਵਜ਼ੇ ਨੂੰ ਲਾਗੂ ਕਰਨ ਨੂੰ ਸਮਰੱਥ ਬਣਾਉਂਦਾ ਹੈ।ਮੁਆਵਜ਼ੇ ਦੀ ਵਿਧੀ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
- CNC ਕੰਟਰੋਲ ਸਿਸਟਮ ਵਿੱਚ ਮੌਜੂਦਾ ਮੁਆਵਜ਼ੇ ਦੇ ਮਾਪਦੰਡਾਂ ਦਾ ਬੈਕਅੱਪ ਬਣਾਉਣਾ।
- ਕੰਪਿਊਟਰ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਪੁਆਇੰਟ-ਬਾਈ-ਪੁਆਇੰਟ ਪੋਜੀਸ਼ਨਿੰਗ ਸ਼ੁੱਧਤਾ ਮਾਪ ਲਈ ਇੱਕ ਮਸ਼ੀਨ ਟੂਲ CNC ਪ੍ਰੋਗਰਾਮ ਤਿਆਰ ਕਰਨਾ, ਜੋ ਕਿ ਫਿਰ CNC ਸਿਸਟਮ ਵਿੱਚ ਪ੍ਰਸਾਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
- ਹਰੇਕ ਬਿੰਦੂ ਦੀ ਸਥਿਤੀ ਦੀ ਗਲਤੀ ਨੂੰ ਆਟੋਮੈਟਿਕ ਮਾਪਣਾ।
- ਪੂਰਵ-ਨਿਰਧਾਰਤ ਮੁਆਵਜ਼ਾ ਬਿੰਦੂਆਂ ਦੇ ਅਧਾਰ ਤੇ ਮੁਆਵਜ਼ੇ ਦੇ ਮਾਪਦੰਡਾਂ ਦਾ ਇੱਕ ਨਵਾਂ ਸੈੱਟ ਤਿਆਰ ਕਰਨਾ ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਆਟੋਮੈਟਿਕ ਪਿੱਚ ਮੁਆਵਜ਼ੇ ਲਈ CNC ਸਿਸਟਮ ਵਿੱਚ ਸੰਚਾਰਿਤ ਕਰਨਾ।
- ਵਾਰ-ਵਾਰ ਸ਼ੁੱਧਤਾ ਦੀ ਪੁਸ਼ਟੀ ਕੀਤੀ ਜਾ ਰਹੀ ਹੈ।
ਇਹਨਾਂ ਖਾਸ ਹੱਲਾਂ ਦਾ ਉਦੇਸ਼ ਸੀਐਨਸੀ ਮਸ਼ੀਨ ਟੂਲਸ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਵਧਾਉਣਾ ਹੈ।ਫਿਰ ਵੀ, ਇਹ ਨੋਟ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੈ ਕਿ ਵੱਖ-ਵੱਖ CNC ਮਸ਼ੀਨ ਟੂਲਸ ਦੀ ਸ਼ੁੱਧਤਾ ਵੱਖ-ਵੱਖ ਹੋ ਸਕਦੀ ਹੈ।ਨਤੀਜੇ ਵਜੋਂ, ਮਸ਼ੀਨ ਟੂਲਸ ਨੂੰ ਉਹਨਾਂ ਦੇ ਵਿਅਕਤੀਗਤ ਹਾਲਾਤਾਂ ਅਨੁਸਾਰ ਕੈਲੀਬਰੇਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।
ਜੇਕਰ ਮਸ਼ੀਨ ਟੂਲ 'ਤੇ ਗਲਤੀ ਦਾ ਮੁਆਵਜ਼ਾ ਨਹੀਂ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇਸ ਦਾ ਪੈਦਾ ਕੀਤੇ CNC ਹਿੱਸਿਆਂ 'ਤੇ ਕੀ ਪ੍ਰਭਾਵ ਪਵੇਗਾ?
ਜੇਕਰ ਮਸ਼ੀਨ ਟੂਲ 'ਤੇ ਗਲਤੀ ਦੇ ਮੁਆਵਜ਼ੇ ਨੂੰ ਨਜ਼ਰਅੰਦਾਜ਼ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇਸ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਵਿੱਚ ਅੰਤਰ ਹੋ ਸਕਦੇ ਹਨCNC ਹਿੱਸੇਨਿਰਮਿਤ.ਉਦਾਹਰਨ ਲਈ, ਜੇਕਰ ਮਸ਼ੀਨ ਟੂਲ ਵਿੱਚ ਇੱਕ ਅਡਜੱਸਟਡ ਪੋਜੀਸ਼ਨਿੰਗ ਗਲਤੀ ਹੈ, ਤਾਂ ਟੂਲ ਜਾਂ ਵਰਕਪੀਸ ਦੀ ਸਹੀ ਸਥਿਤੀ CNC ਪ੍ਰੋਗਰਾਮ ਵਿੱਚ ਨਿਰਧਾਰਤ ਪ੍ਰੋਗ੍ਰਾਮਡ ਸਥਿਤੀ ਤੋਂ ਵੱਖ ਹੋ ਸਕਦੀ ਹੈ, ਜਿਸ ਨਾਲ ਉਤਪਾਦਿਤ ਹਿੱਸਿਆਂ ਵਿੱਚ ਅਯਾਮੀ ਅਸ਼ੁੱਧੀਆਂ ਅਤੇ ਜਿਓਮੈਟ੍ਰਿਕ ਗਲਤੀਆਂ ਹੋ ਸਕਦੀਆਂ ਹਨ।
ਉਦਾਹਰਨ ਲਈ, ਜੇਕਰ ਇੱਕ ਸੀਐਨਸੀ ਮਿਲਿੰਗ ਮਸ਼ੀਨ ਵਿੱਚ ਐਕਸ-ਐਕਸਿਸ ਵਿੱਚ ਇੱਕ ਅਡਜੱਸਟਿਡ ਪੋਜੀਸ਼ਨਿੰਗ ਗਲਤੀ ਹੈ, ਤਾਂ ਵਰਕਪੀਸ ਵਿੱਚ ਮਿੱਲਡ ਸਲਾਟ ਜਾਂ ਛੇਕ ਗਲਤ ਅਲਾਈਨ ਹੋ ਸਕਦੇ ਹਨ ਜਾਂ ਗਲਤ ਮਾਪ ਹੋ ਸਕਦੇ ਹਨ।ਇਸੇ ਤਰ੍ਹਾਂ, ਇੱਕ ਲੇਥ ਓਪਰੇਸ਼ਨ ਵਿੱਚ, ਅਵਿਵਸਥਿਤ ਸਥਿਤੀ ਦੀਆਂ ਗਲਤੀਆਂ ਬਦਲੇ ਹੋਏ ਹਿੱਸਿਆਂ ਦੇ ਵਿਆਸ ਜਾਂ ਲੰਬਾਈ ਵਿੱਚ ਅਸ਼ੁੱਧੀਆਂ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀਆਂ ਹਨ।ਇਹ ਮਤਭੇਦ ਗੈਰ-ਅਨੁਕੂਲ ਹਿੱਸੇ ਪੈਦਾ ਕਰ ਸਕਦੇ ਹਨ ਜੋ ਅਸਫਲ ਹੋ ਜਾਂਦੇ ਹਨ
Anebon ਹਰ ਇੱਕ ਸਖ਼ਤ ਮਿਹਨਤ ਨੂੰ ਸ਼ਾਨਦਾਰ ਅਤੇ ਸ਼ਾਨਦਾਰ ਬਣਨ ਲਈ ਬਣਾਵੇਗਾ, ਅਤੇ OEM, ਕਸਟਮ ਲਈ ਚੀਨ ਗੋਲਡ ਸਪਲਾਇਰ ਲਈ ਇੰਟਰਕੌਂਟੀਨੈਂਟਲ ਸਿਖਰ-ਗਰੇਡ ਅਤੇ ਉੱਚ-ਤਕਨੀਕੀ ਉੱਦਮਾਂ ਦੇ ਰੈਂਕ ਤੋਂ ਖੜ੍ਹੇ ਹੋਣ ਲਈ ਸਾਡੇ ਉਪਾਵਾਂ ਨੂੰ ਤੇਜ਼ ਕਰੇਗਾ.ਸੀਐਨਸੀ ਮਸ਼ੀਨਿੰਗ ਸੇਵਾ, ਸ਼ੀਟ ਮੈਟਲ ਫੈਬਰੀਕੇਸ਼ਨ ਸੇਵਾ, ਮਿਲਿੰਗ ਸੇਵਾਵਾਂ।ਅਨੇਬੋਨ ਤੁਹਾਡੇ ਆਪਣੇ ਤਸੱਲੀਬਖਸ਼ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਤੁਹਾਡੀ ਵਿਅਕਤੀਗਤ ਖਰੀਦਦਾਰੀ ਕਰੇਗਾ!ਅਨੇਬੋਨ ਦਾ ਕਾਰੋਬਾਰ ਕਈ ਵਿਭਾਗ ਸਥਾਪਤ ਕਰਦਾ ਹੈ, ਜਿਸ ਵਿੱਚ ਆਉਟਪੁੱਟ ਵਿਭਾਗ, ਮਾਲ ਵਿਭਾਗ, ਸ਼ਾਨਦਾਰ ਨਿਯੰਤਰਣ ਵਿਭਾਗ ਅਤੇ ਸੇਵਾ ਕੇਂਦਰ ਆਦਿ ਸ਼ਾਮਲ ਹਨ।
ਫੈਕਟਰੀ ਸਪਲਾਈ ਚੀਨਸ਼ੁੱਧਤਾ ਭਾਗ ਅਤੇ ਅਲਮੀਨੀਅਮ ਭਾਗ, ਤੁਸੀਂ ਅਨੇਬੋਨ ਨੂੰ ਮਾਰਕੀਟ ਵਿੱਚ ਬਹੁਤ ਜ਼ਿਆਦਾ ਸਮਾਨ ਹਿੱਸਿਆਂ ਨੂੰ ਰੋਕਣ ਲਈ ਆਪਣੇ ਖੁਦ ਦੇ ਮਾਡਲ ਲਈ ਵਿਲੱਖਣ ਡਿਜ਼ਾਈਨ ਵਿਕਸਿਤ ਕਰਨ ਲਈ ਆਪਣੇ ਵਿਚਾਰ ਬਾਰੇ ਦੱਸ ਸਕਦੇ ਹੋ!ਅਸੀਂ ਤੁਹਾਡੀਆਂ ਸਾਰੀਆਂ ਜ਼ਰੂਰਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਸਾਡੀ ਸਭ ਤੋਂ ਵਧੀਆ ਸੇਵਾ ਦੇਣ ਜਾ ਰਹੇ ਹਾਂ!Anebon ਨਾਲ ਤੁਰੰਤ ਸੰਪਰਕ ਕਰਨਾ ਯਾਦ ਰੱਖੋ!
ਪੋਸਟ ਟਾਈਮ: ਜਨਵਰੀ-09-2024