
Эфектыўнасць абсталявання для станкоў з ЧПУ цесна звязана з яго дакладнасцю, што робіць яго ключавым прыярытэтам для кампаній пры закупцы або распрацоўцы такіх інструментаў.Аднак дакладнасць большасці новых станкоў часта не адпавядае неабходным стандартам пасля выхаду з завода.Акрамя таго, узнікненне механічнай абкаткі і зносу падчас працяглага выкарыстання падкрэслівае жыццёва важную неабходнасць рэгулявання дакладнасці станкоў з ЧПУ для забеспячэння аптымальнай прадукцыйнасці вытворчасці.
1. Кампенсацыя люфта
Памяншэнне люфта У станках з ЧПУ памылкі, якія ўзнікаюць з-за зваротных мёртвых зон вядучых кампанентаў у ланцугу перадачы падачы кожнай каардынатнай восі і зваротнага зазору кожнай пары механічных перадач руху, прыводзяць да адхіленняў, калі кожная каардынатная вось пераходзіць ад руху наперад да зваротнага.Гэта адхіленне, таксама вядомае як зваротны зазор або страта імпульсу, можа істотна паўплываць на дакладнасць пазіцыянавання і паўтаральную дакладнасць пазіцыянавання станка пры выкарыстанні паўзамкнёных сервасістэм.Акрамя таго, паступовае павелічэнне зазораў кінематычных пар з-за зносу з цягам часу прыводзіць да адпаведнага павелічэння адхіленні задняга ходу.Таму рэгулярныя вымярэнні і кампенсацыя зваротнага адхіленні кожнай каардынатнай восі станка з'яўляюцца абавязковымі.

Вымярэнне люфта
Каб ацаніць зваротнае адхіленне, пачніце з дыяпазону ходу восі каардынат.Спачатку ўсталюйце кропку адліку, перамясціўшыся на зададзеную адлегласць у прамым або зваротным кірунку.Пасля гэтага аддайце пэўную каманду руху ў тым жа кірунку, каб пераадолець пэўную адлегласць.Далей перамясціцеся на такое ж адлегласць у процілеглым кірунку і вызначыце дысперсію паміж апорным становішчам і становішчам прыпынку.Як правіла, некалькі вымярэнняў (часта сем) праводзяцца ў трох месцах паблізу сярэдзіны і абодвух крайніх кропак дыяпазону.Затым у кожным месцы вылічваецца сярэдняе значэнне, прычым максімальнае сярод гэтых сярэдніх значэнняў выкарыстоўваецца ў якасці вымярэння зваротнага адхілення.Для дакладнага вызначэння значэння зваротнага адхіленні падчас вымярэнняў неабходна перамяшчацца на пэўную адлегласць.

Пры ацэнцы зваротнага адхілення восі лінейнага руху ў якасці інструмента вымярэння звычайна выкарыстоўваюць цыферблатны індыкатар або цыферблатны датчык.Калі дазваляюць абставіны, для гэтай мэты можа быць выкарыстаны двухчастотны лазерны інтэрферометр.Пры выкарыстанні цыферблатнага індыкатара для вымярэнняў вельмі важна сачыць за тым, каб падстава і стрыжань лічыльніка не высоўваліся празмерна, паколькі доўгая кансоль падчас вымярэння можа выклікаць перамяшчэнне падставы лічыльніка з-за сілы, што прывядзе да недакладных паказанняў і нерэальных значэнняў кампенсацыі.
Укараненне метаду праграмавання для вымярэння можа павысіць зручнасць і дакладнасць працэсу.Напрыклад, для ацэнкі зваротнага адхілення восі X на трохкаардынатным вертыкальным станку працэс можна пачаць з прыціскання вымяральніка да цыліндрычнай паверхні шпіндзеля з наступным выкананнем прызначанай праграмы для вымярэння.
N10G91G01X50F1000;перанесці варштат направа
N20X-50;працоўны стол перамяшчаецца налева, каб ліквідаваць зазор перадачы
N30G04X5;паўза для назірання
N40Z50;Вось Z паднятая і збоку
N50X-50: Варштат рухаецца налева
N60X50: Варштат рухаецца ўправа і скідаецца
N70Z-50: скід восі Z
N80G04X5: Паўза для назірання
N90M99;
Важна адзначыць, што вынікі вымярэнняў могуць адрознівацца ў залежнасці ад розных працоўных хуткасцей варштата.Як правіла, вымеранае значэнне на нізкай хуткасці больш, чым на высокай хуткасці, асабліва калі нагрузка на восі станка і супраціўленне руху істотныя.Пры больш нізкіх хуткасцях працоўны стол рухаецца павольней, што прыводзіць да меншай верагоднасці перавышэння і пераходу, а значыць, дае больш высокае вымеранае значэнне.З іншага боку, пры больш высокіх хуткасцях з-за большай хуткасці працоўнага стала часцей узнікаюць перавышэнні і пераходы, што прыводзіць да меншага вымеранага значэння.Падыход да вымярэння зваротнага адхілення восі вярчальнага руху прытрымліваецца працэсу, аналагічнага працэсу вымярэння лінейнай восі, з адзінай розніцай у прыборы, які выкарыстоўваецца для выяўлення.

Кампенсацыя люфта
Шматлікія станкі з ЧПУ, вырабленыя ў краіне, дэманструюць дакладнасць пазіцыянавання больш за 0,02 мм, але не маюць магчымасці для кампенсацыі.У некаторых сітуацыях метады праграмавання могуць быць выкарыстаны для выканання аднабаковага пазіцыянавання і ліквідацыі люфта для такіх станкоў.Пакуль механічны кампанент застаецца нязменным, ініцыяванне апрацоўкі інтэрпаляцыі магчыма, як толькі нізкахуткаснае аднабаковае пазіцыянаванне дасягне пачатковай кропкі для інтэрпаляцыі.Пры сутыкненні з зваротным кірункам падчас падачы інтэрпаляцыі фармальная інтэрпаляцыя значэння зваротнага зазору можа павысіць дакладнасць апрацоўкі інтэрпаляцыі і эфектыўна адпавядаць патрабаваннямфрэзераваная дэталь з ЧПУПатрабаванні да талерантнасці.
Для іншых разнавіднасцей станкоў з ЧПУ некалькі адрасоў памяці ў прыладзе з ЧПУ звычайна прызначаюцца для захоўвання значэння люфта кожнай восі.Калі вось станка накіравана на змяненне напрамку руху, прылада ЧПУ аўтаматычна атрымае значэнне люфта восі, якое кампенсуе і выпраўляе значэнне каманды перамяшчэння каардынаты.Гэта гарантуе, што станок можа быць дакладна пазіцыянаваны ў камандным становішчы і змякчае негатыўны ўплыў зваротнага адхілення на дакладнасць станка.
Як правіла, сістэмы ЧПУ абсталяваны адным даступным значэннем кампенсацыі люфта.Збалансаваць дакладнасць руху на высокай і нізкай хуткасцях, а таксама ўдасканаліць механізмы становіцца складана.Больш за тое, значэнне зваротнага адхілення, вымеранае падчас хуткага руху, можа быць выкарыстана толькі ў якасці ўваходнага значэння кампенсацыі.Такім чынам, дасягненне раўнавагі паміж хуткай дакладнасцю пазіцыянавання і дакладнасцю інтэрпаляцыі падчас рэзкі аказваецца складаным.

Для сістэм ЧПУ, такіх як FANUC0i і FANUC18i, ёсць дзве даступныя формы кампенсацыі люфта для хуткага руху (G00) і павольнага руху рэзкі (G01).У залежнасці ад абранага метаду падачы, сістэма ЧПУ аўтаматычна выбірае і выкарыстоўвае розныя значэнні кампенсацыі для дасягнення падвышанай дакладнасці апрацоўкі.
Значэнне люфта A, атрыманае з руху падачы пры рэзанні G01, павінна быць уведзена ў параметр NO11851 (пробная хуткасць G01 павінна быць вызначана на аснове звычайна выкарыстоўванай хуткасці падачы рэзання і характарыстык станка), у той час як значэнне люфта B з G00 павінна быць уведзена у параметр NO11852.Важна адзначыць, што калі сістэма ЧПУ імкнецца выканаць асобна зададзеную кампенсацыю зваротнага люфта, чацвёртая лічба (RBK) нумара параметра 1800 павінна быць усталявана ў 1;у адваротным выпадку асобна вызначаная кампенсацыя зваротнага люфта не будзе праводзіцца.Кампенсацыя разрыву.G02, G03, JOG і G01 выкарыстоўваюць аднолькавае значэнне кампенсацыі.

Кампенсацыя за памылкі вышыні тону
Дакладнае пазіцыянаванне станкоў з ЧПУ прадугледжвае ацэнку дакладнасці, з якой рухомыя кампаненты станка могуць дасягнуць пад камандай сістэмы ЧПУ.Гэтая дакладнасць гуляе вырашальную ролю ў адрозненні станкоў з ЧПУ ад звычайных.У адпаведнасці з геаметрычнай дакладнасцю станка гэта істотна ўплывае на дакладнасць рэзання, асабліва пры апрацоўцы адтулін.Памылка кроку пры свідраванні адтулін аказвае істотны ўплыў.Здольнасць станка з ЧПУ ацэньваць дакладнасць апрацоўкі залежыць ад дасягнутай дакладнасці пазіцыянавання.Такім чынам, выяўленне і выпраўленне дакладнасці пазіцыянавання станкоў з ЧПУ з'яўляюцца важнымі мерамі для забеспячэння якасці апрацоўкі.
Працэс вымярэння вышыні
У цяперашні час асноўным метадам ацэнкі і апрацоўкі станкоў з'яўляецца выкарыстанне двухчашчынных лазерных інтэрферометраў.Гэтыя інтэрферометры працуюць на прынцыпах лазернай інтэрфераметрыі і выкарыстоўваюць даўжыню хвалі лазера ў рэальным часе ў якасці эталона для вымярэння, тым самым павышаючы дакладнасць вымярэнняў і пашыраючы спектр прымянення.
Працэс вызначэння вышыні наступны:
- Усталюйце двухчастотны лазерны інтэрферометр.
- Размясціце аптычны вымяральны прыбор уздоўж восі станка, які патрабуе вымярэння.
- Выраўнуйце лазерную галоўку, каб пераканацца, што вось вымярэння паралельная або колінеарная восі руху станка, папярэдне выраўноўваючы аптычны шлях.
- Калі лазер дасягне працоўнай тэмпературы, увядзіце параметры вымярэння.
- Выканайце прадпісаныя працэдуры вымярэнняў, перамяшчаючы станок.
- Апрацоўвайце даныя і стварайце вынікі.
Кампенсацыя памылкі вышыні тону і аўтаматычная каліброўка
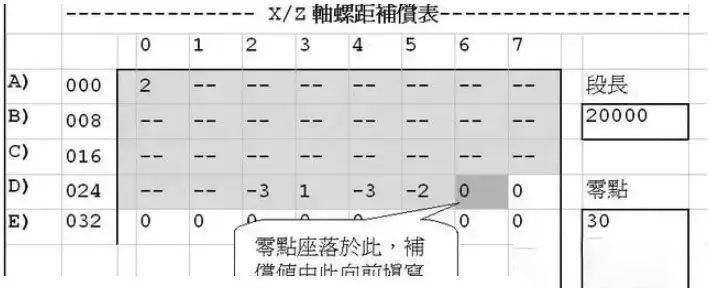
Калі вымераная памылка пазіцыянавання станка з ЧПУ перавышае дапушчальны дыяпазон, узнікае неабходнасць выправіць памылку.Адзін з распаўсюджаных падыходаў прадугледжвае вылічэнне табліцы кампенсацыі памылак кроку і ручной увод яе ў сістэму ЧПУ станка для выпраўлення памылкі пазіцыянавання.Аднак ручная кампенсацыя можа заняць шмат часу і схільная да памылак, асабліва пры працы са шматлікімі кропкамі кампенсацыі па трох ці чатырох восях станка з ЧПУ.
Каб спрасціць гэты працэс, было распрацавана рашэнне.Звязваючы кампутар і кантролер ЧПУ станка праз інтэрфейс RS232 і выкарыстоўваючы праграмнае забеспячэнне для аўтаматычнай каліброўкі, створанае ў VB, можна сінхранізаваць лазерны інтэрферометр і станок з ЧПУ.Гэтая сінхранізацыя дазваляе аўтаматычна вызначаць дакладнасць пазіцыянавання станка з ЧПУ і рэалізацыю аўтаматычнай кампенсацыі памылак кроку.Метад кампенсацыі ўключае:
- Стварэнне рэзервовай копіі існуючых параметраў кампенсацыі ў сістэме ЧПУ.
- Стварэнне праграмы станка з ЧПУ для кропкавага вымярэння дакладнасці пазіцыянавання з дапамогай кампутара, якая затым перадаецца ў сістэму ЧПУ.
- Аўтаматычнае вымярэнне памылкі пазіцыянавання кожнай кропкі.
- Стварэнне новага набору параметраў кампенсацыі на аснове загадзя вызначаных кропак кампенсацыі і іх перадача ў сістэму ЧПУ для аўтаматычнай кампенсацыі кроку.
- Неаднаразовая праверка дакладнасці.
Гэтыя спецыяльныя рашэнні накіраваны на павышэнне дакладнасці станкоў з ЧПУ.Тым не менш, важна адзначыць, што дакладнасць розных станкоў з ЧПУ можа адрознівацца.У выніку станкі павінны быць адкалібраваны ў адпаведнасці з іх індывідуальнымі абставінамі.
Калі кампенсацыя памылак не выконваецца на станку, які ўплыў гэта акажа на вырабленыя дэталі з ЧПУ?
Калі на станку не ўлічваць кампенсацыю памылак, гэта можа прывесці да разыходжанняў уДэталі ЧПУвыраблены.Напрыклад, калі станок мае неадрэгуляваную памылку пазіцыянавання, сапраўднае становішча інструмента або нарыхтоўкі можа адрознівацца ад запраграмаванага становішча, указанага ў праграме ЧПУ, што прывядзе да недакладнасцей у памерах і геаметрычных памылак у вырабленых дэталях.
Напрыклад, калі фрэзерны станок з ЧПУ мае неадрэгуляваную памылку пазіцыянавання па восі X, фрэзераваныя пазы або адтуліны ў нарыхтоўцы могуць быць няправільна выраўнаваны або мець няправільныя памеры.Сапраўды гэтак жа ў такарным станку няправільныя памылкі пазіцыянавання могуць выклікаць недакладнасці ў дыяметры або даўжыні точаных дэталяў.Гэтыя разыходжанні могуць прывесці да выхаду з ладу неадпаведных дэталяў
Anebon прымусіць кожнага цяжка працаваць, каб стаць выдатным і выдатным, і паскорыць нашы меры для выхаду з ліку міжкантынентальных высакакласных і высокатэхналагічных прадпрыемстваў для Кітайскага пастаўшчыка золата для OEM, Customпаслугі апрацоўкі з ЧПУ, паслугі па вырабе ліставога металу, фрэзерныя паслугі.Anebon зробіць вашу персаналізаваную пакупку, каб задаволіць вас!Кампанія Anebon стварае некалькі аддзелаў, у тым ліку аддзел вытворчасці, аддзел даходаў, выдатны аддзел кантролю і сэрвісны цэнтр і г.д.
Завадскія пастаўкі ў КітайПрэцызійныя дэталі і алюмініевыя дэталі, Вы можаце паведаміць Anebon пра сваю ідэю распрацаваць унікальны дызайн для вашай уласнай мадэлі, каб прадухіліць занадта шмат падобных дэталяў на рынку!Мы збіраемся даць наш лепшы сэрвіс, каб задаволіць усе вашыя патрэбы!Не забудзьце неадкладна звязацца з Anebon!
Час публікацыі: 9 студзеня 2024 г